3.4Setting Stop Mode
109
Output → SG-COM 1CN-10
Output Signal Ground
Common
For Speed/Torque
Control and
Position Control
This is a signal ground for the output signals shown below. Connect this signal terminal to
0 V on the external power supply.
Contact Output Signals: BK
(1CN-7)
V-CMP
(1CN-8) (for speed/torque control only)
COIN
(1CN-8) (for position control only)
TGON
(1CN-9)
3) If the machine moves slightly due to gravity when the brake is applied, set the following
user constant to adjust brake ON timing:
Cn-12
BRKTIM
Time delay from the
time a brake signal is
output until servo OFF
status occurs
Unit:
10 ms
Setting
Range:
0to50
Factory
Setting:
0
For
Speed/Torque
Control and
Position Control
This user constant is used to set output timing of
brake control signal BK (1CN-7) and servo OFF
operation (motor output stop) when SGM/SGMP
Servomotor with brake is used.
With the standard setting, the servo is turned OFF when BK signal (brake operation) is
output. The machine may move slightly due to gravitation. This movement depends on
machine configuration and brake characteristics. If this happens, use this user constant
to delay servo OFF timing to prevent the machine from moving.
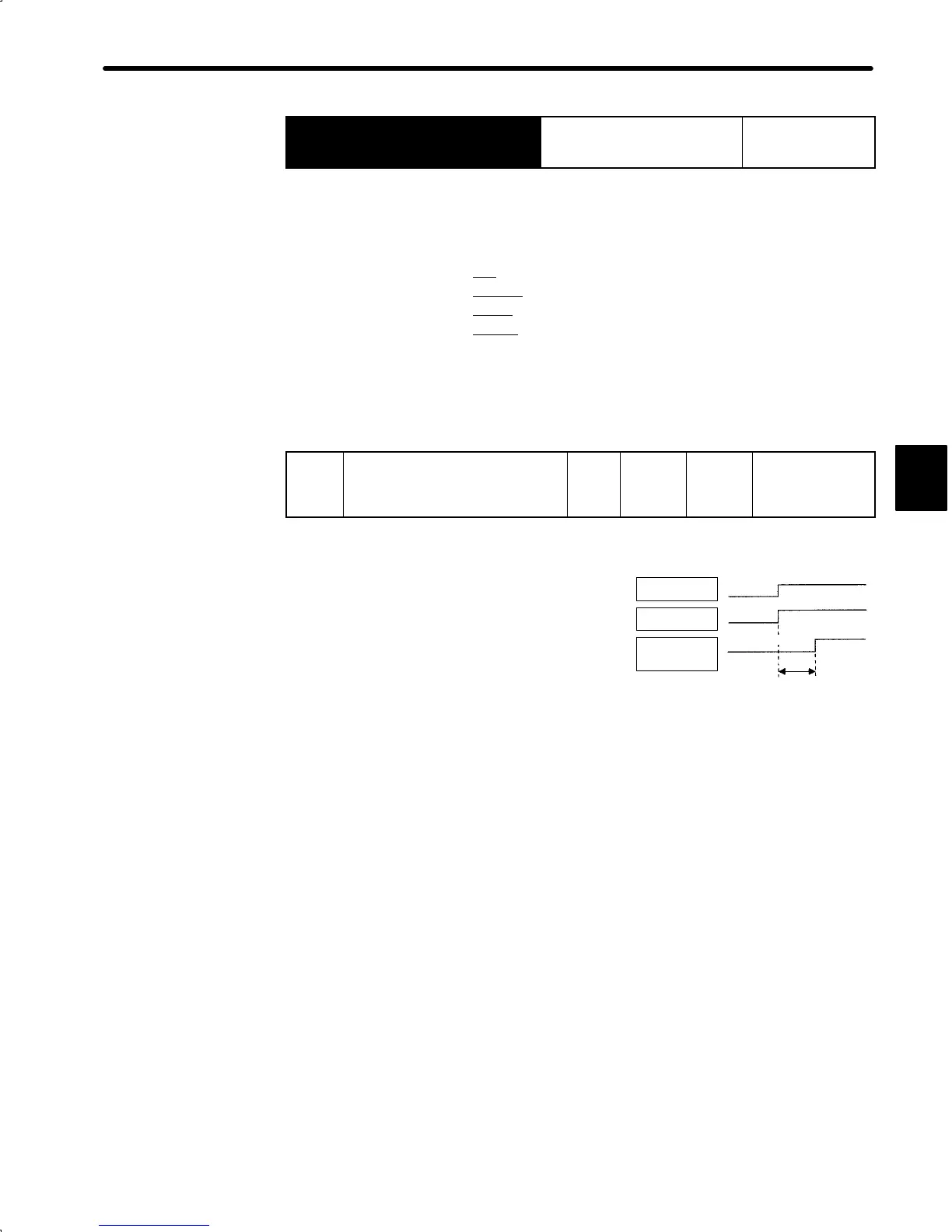
Set in this constant the brake ON timing used when the motor is in stopped status.
For brake ON timing during motor operation, use Cn-15 and Cn-16.
3
Brake Timing when Motor is in Stopped Status
S-ON input
(1CN-14)
BK output
(1CN-7)
Servo ON/OFF
operation (motor
ON/OFF status)
Servo ON
Release
brake
Servo OFF
Apply brake
BRKTIM
Motor is
OFF
Motor is ON
 Loading...
Loading...






