3.8 Special Wiring
153
For position control (SGDA-
jjj
P).
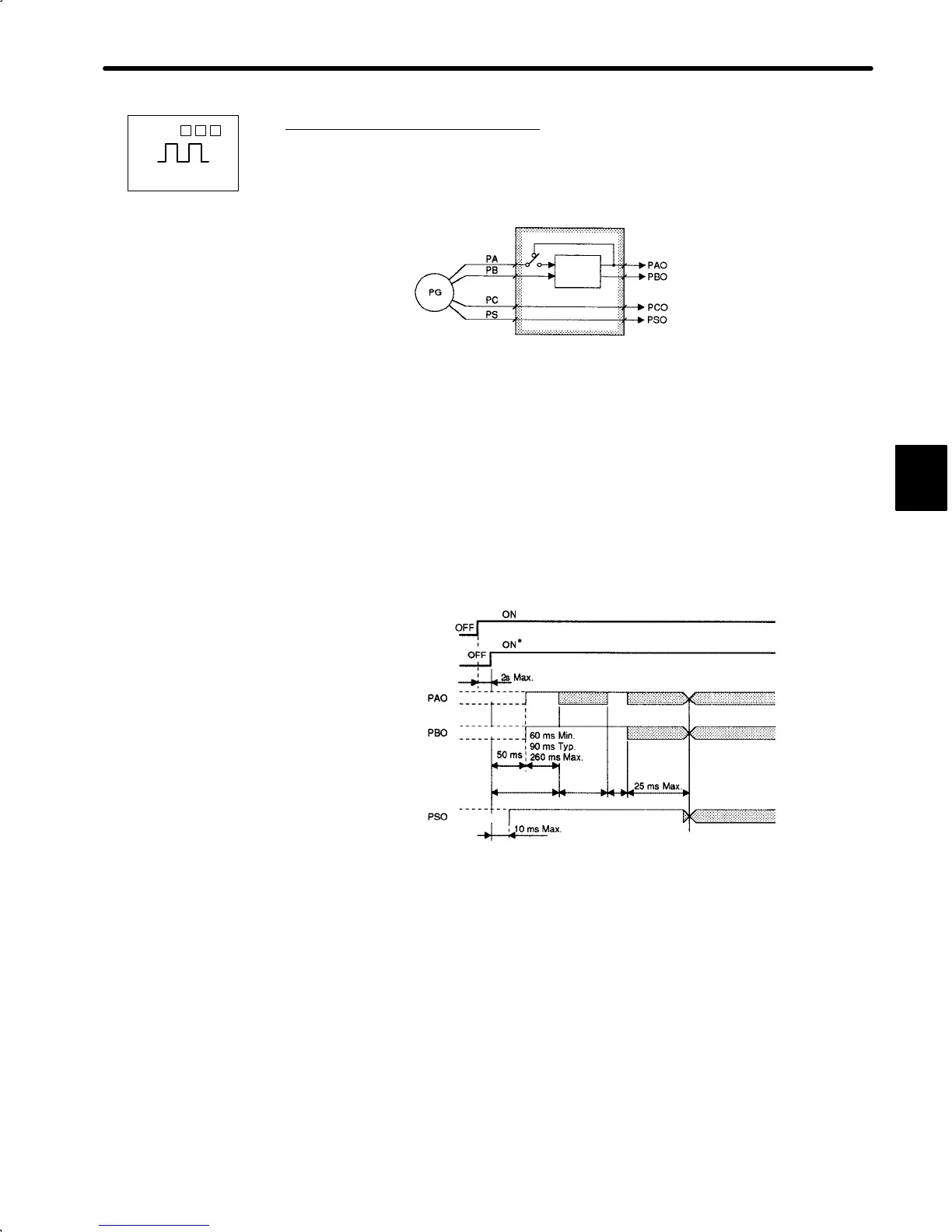
A 12-bit absolute encoder outputs PAO, PBO, PCO and PSO as shown below.
Servopack
Serial data
Frequency
dividing
circuit
Absolute data is read from phase S (PSO) as serial data. It is first output from PAO as
serial data when the Servopack is turned ON. Next, it is output as initial incremental
pulses PAO and PBO (two-phase pulse with 90° phase difference).
Then, output operation becomes the same as normal incremental encoder operation
(two-phase pulse with 90° phase difference).
Rotation count serial data is output from PSO. Absolute data must be processed in the
following sequence.
Servopack power supply
Encoder power supply
Serial data
Initial
incremental
pulse
Incremental
pulse
Undefined
Rotation count
serial data
*Encoder power is automatically turned ON
inside the Servopack.
Undefined
(Phase A) (Phase A)
(Phase B) (Phase B)
Undefined
Approx.
23 ms
120 to 300 ms
1to3ms
Use PAO, PBO and PCO as necessary. If PAO and PBO are used, absolute data is
output to PAO and PBO when power is turned ON as shown in the figure above. How-
ever, since encoder power ON timing is not adjusted within the processing circuit pre-
pared by the customer, absolute data cannot be read via PAO or PBO.
3
SGDA- P
Positions
 Loading...
Loading...






