FOR FIRST−TIME USERS OF AC SERVOS
1.1.3 Features of Σ-Series Servos cont.
12
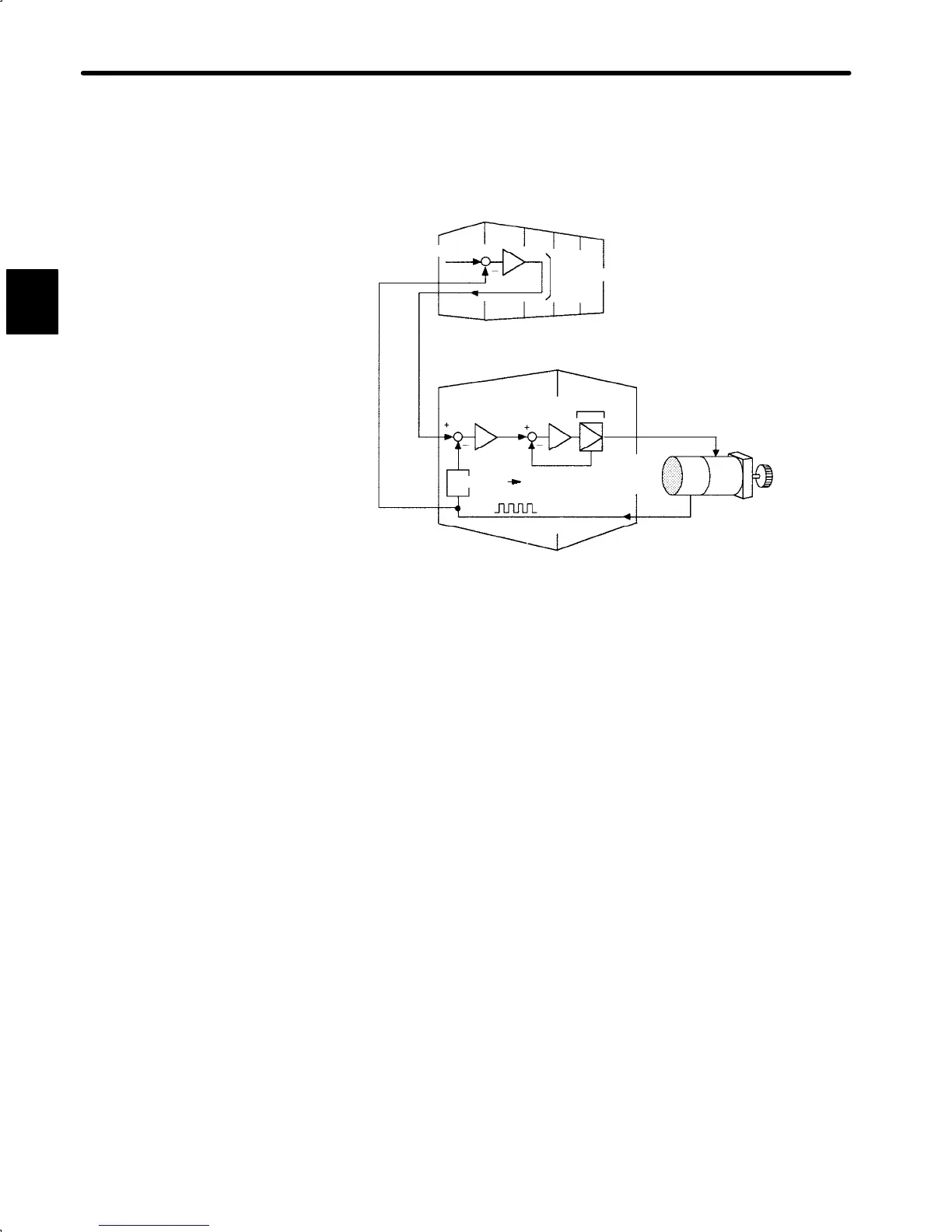
3) The most common usage of a Servopack for speed/torque control is shown below:
• Using Servopack for Speed/Torque Control (Speed Control)
Host controller
Position reference +
Speed
reference
Servopack for
speed/torque control
Power
amplifier
(Analog
voltage)
Position
Convert
Torque
(current)
feedback
Pulse train
Servomotor
Position feedback
Encoder
Position control loop
Position
feedback
Speed
As shown in the figure above, a position control loop is formed in the host controller. The
host controller compares a position reference with a position feedback signal and sends
processing results to the Servopack as a speed reference.
In this way, the host controller can freely perform the control required for the servo mech-
anism.
The Servopack undertakes the speed control loop and subsequent control processing.
Yaskawa programmable machine controller PROGIC-8 is available as a typical host con-
troller.
1
 Loading...
Loading...






