APPLICATIONS OF Σ-SERIES PRODUCTS
3.1.2 Setting the Overtravel Limit Functioncont.
58
Setting Meaning
Cn-01
0
Stops the motor in the same way as when the servo is turned OFF.
The motor is stopped by dynamic brake or coasts to a stop. Either of
these stop modes can be selected by setting bit 6 of Cn-01.
bit 8
1
Stops the motor by decelerating it with the preset torque.
Preset value: Cn-06 (EMGTRQ) emergency stop torque
If deceleration stop mode is selected, specify the operation to be done after the motor
stops.
Setting Meaning
0
Turns the servo OFF when the motor stops in deceleration stop mode.
Cn-01
bit 9
1
Causes the motor to enter zero-clamp status after it stops in deceleration
stop mode.
If torque control mode is selected for the Servopack for speed/torque control
(SGDA-jjjS), the motor stops in the same way as when the servo is turned OFF,
regardless of the setting of Cn-01 bit 8.
Cn-06
EMGTRQ
Emergency Stop
Torque
Unit:
%
Setting
Range: 0 to
Maximum
Torque
Factory
Setting:
Maximum
Torque
For Speed/Torque
Control and Position
Control
Specifies the stop torque to be applied at overtra-
vel when the input signal for prohibiting forward or
reverse rotation is to be used.
Specifies a torque value in terms of a percentage
of the rated torque.
Cn-01 Bit 6
How to Stop Motor at Servo
OFF
Factory
Setting: 0
For Speed/Torque Control
and Position Control
Cn-01 Bit 7
Operation to Be Performed
when Motor Stops after Servo
OFF
Factory
Setting: 1
For Speed/Torque Control
and Position Control
The Servopack enters servo OFF status when:
• Servo ON input signal (S-ON, 1CN-14) is turned
OFF.
• Servo alarm arises.
• Power is turned OFF.
Specify how to stop the motor when one of the
above events occurs during operation.
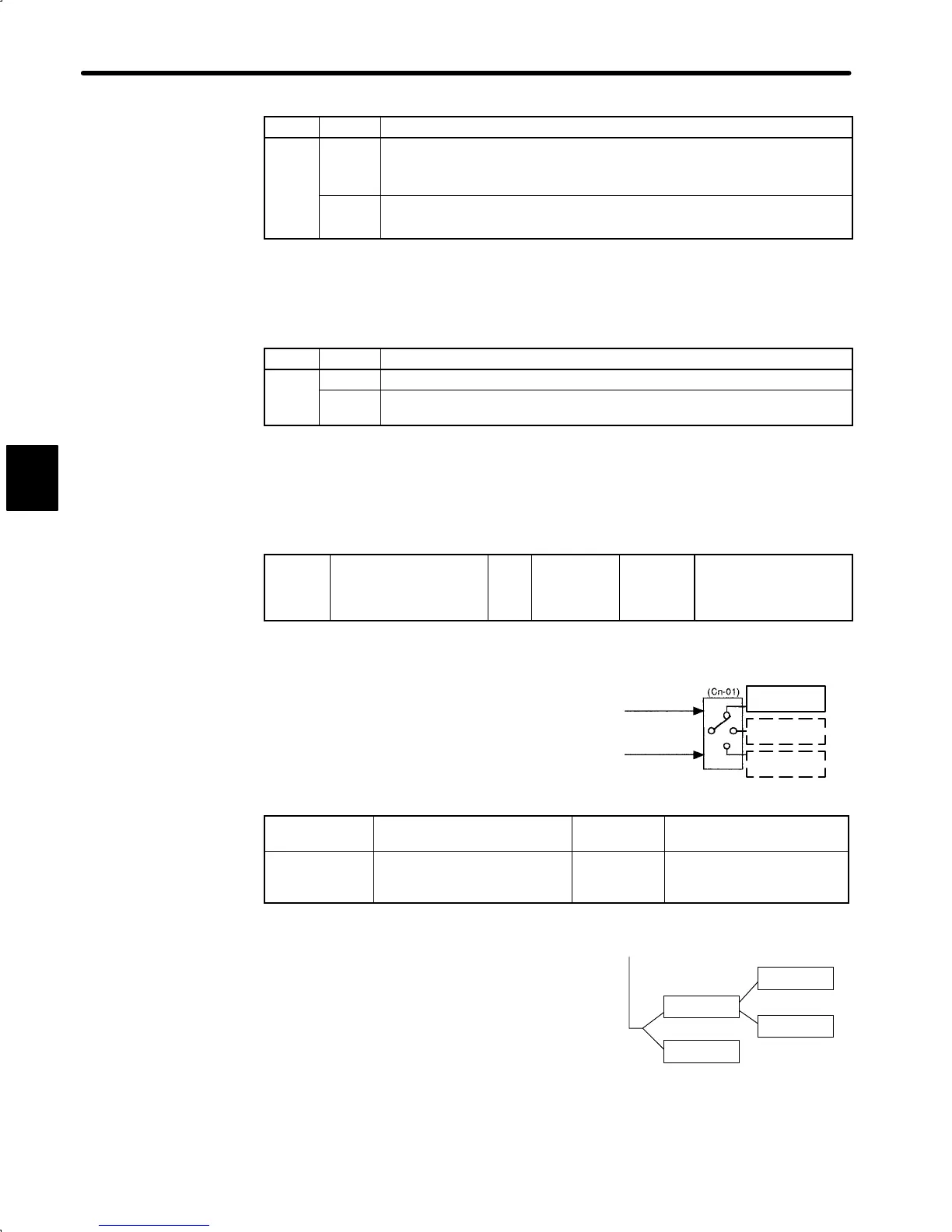
3
Input signal for
prohibiting
forward rotation
P-OT (1CN-16)
Memory
switch
Input signal for
prohibiting reverse
rotation
N-OT (1CN-17)
Emergency
stop torque
Stop by
dynamic brake
Coasting to a
stop
Stop mode
After stop
Bit 6
0
1
Coasting to a
stop
Servo OFF
Releasing
dynamic brake
Stop by
dynamic brake
Holding
dynamic brake
0
1
Bit 7
Dynamic brake is a function that
electrically applies brakes by using a
resistor to consume motor rotation
energy.
 Loading...
Loading...






