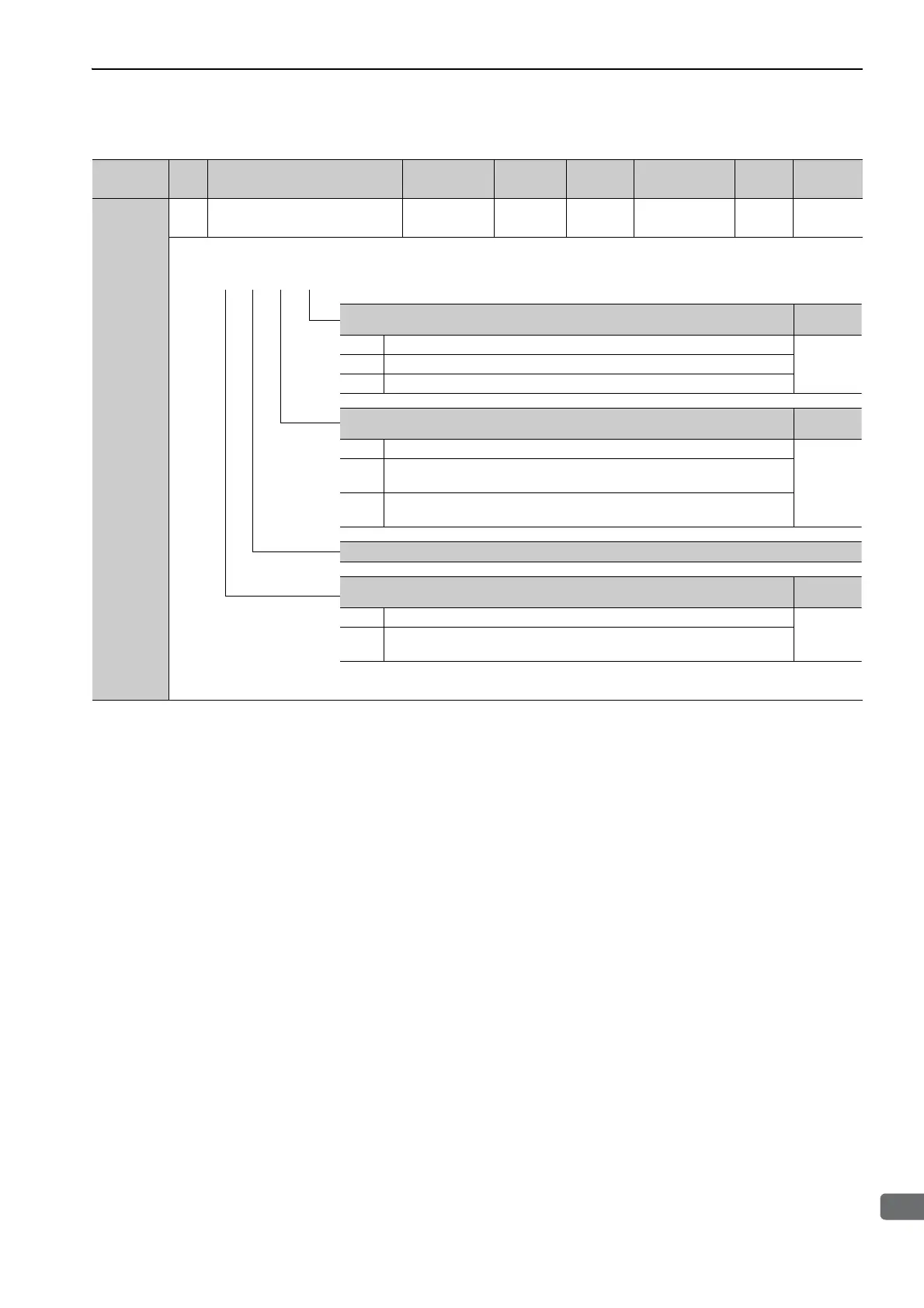
No.
Servomotor Power OFF or Alarm Gr.1 Stop Mode
Reference
Section
0 Stops the servomotor by applying DB (dynamic brake).
5.2.5
1 Stops the servomotor by applying DB and then releases DB.
2 Makes the servomotor coast to a stop state without using the DB.
Overtravel (OT) Stop Mode
Reference
Section
0 Stops in accordance with the setting of Pn001.0.
5.2.3
1 Sets the torque of Pn406 to the maximum value, decelerates the servomotor to a stop,
and then sets it to servolock state.
2 Sets the torque of Pn406 to the maximum value, decelerates the servomotor to a stop,
and then sets it to coasting state.
Reserved (Do not change.)
Warning Code Output Selection
Reference
Section
0 ALO1, ALO2, and ALO3 output only alarm codes.
5.10.2
1 ALO1, ALO2, and ALO3 output both alarm codes and warning codes. While warning
codes are output, ALM signal output remains ON (normal state).
4th 3rd 2nd 1st
digit digit digit digit
n.

 Loading...
Loading...





