Parameters 455
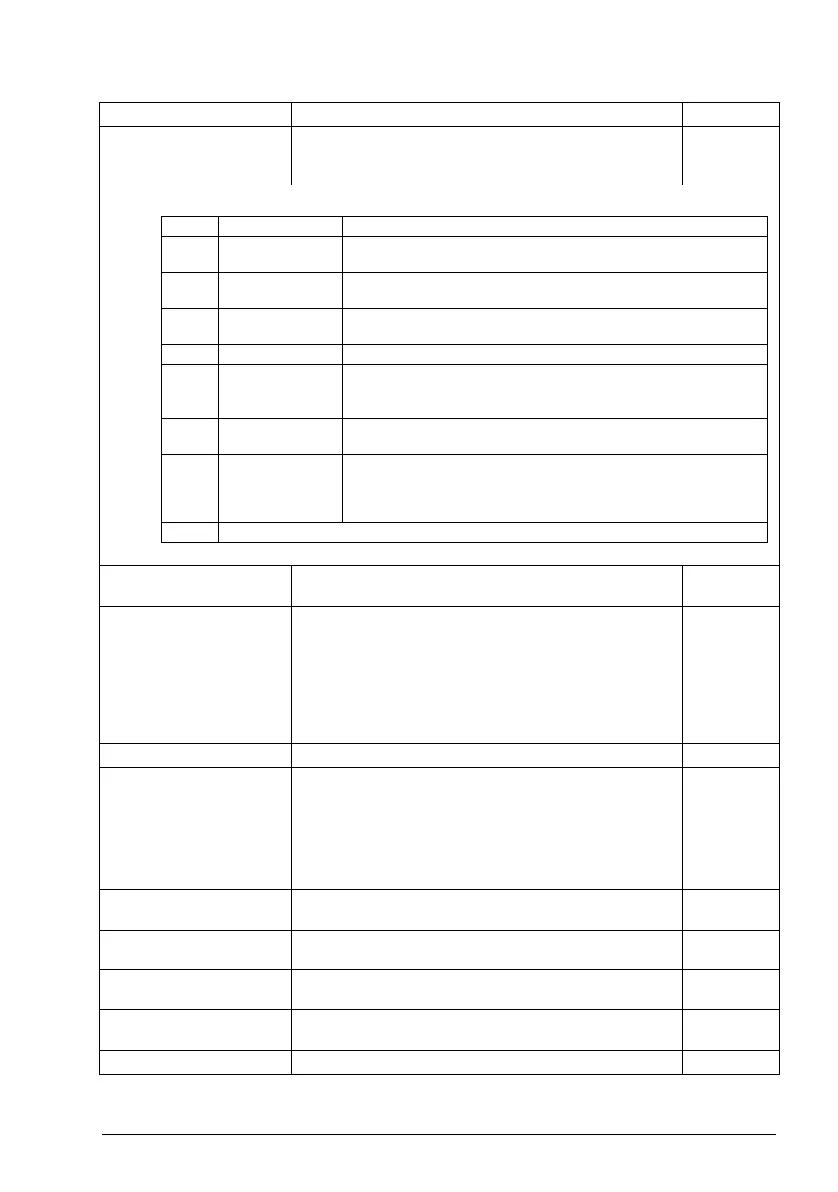
90.35 Pos counter status Status information related to the position counter function.
See section Position counter (page 88).
This parameter is read-only.
-
0000 0000b …
0111 1111b
Position counter status word. 1 = 1
90.38 Pos counter
decimals
Scales the values of parameters 90.05 Load position scaled
and 90.65 Pos counter init value when written from or read to
from an external source (eg. fieldbus). The setting
corresponds to the number of decimal places.
For example, with the setting of 3, an integer value of 66770
written into 90.65 Pos counter init value is divided by 1000, so
the final value applied will be 66.770. Likewise, the value of
90.05 Load position scaled is multiplied by 1000 when read.
3
0…9 Number of position counter decimal places. 1 = 1
90.41 Motor feedback
selection
Selects the motor speed feedback value used during motor
control.
Note: With a permanent magnet motor, make sure an
autophasing routine (see page 96) is performed using the
selected encoder. If necessary, set parameter 99.13 ID run
requested to Autophasing to request a fresh autophasing
routine.
Estimate
Estimate A calculated speed estimate generated from the DTC core is
used.
0
Encoder 1 Actual speed measured by encoder 1. The encoder is set up
by the parameters in group 92 Encoder 1 configuration.
1
Encoder 2 Actual speed measured by encoder 2. The encoder is set up
by the parameters in group 93 Encoder 2 configuration.
2
90.42 Motor speed filter
time
Defines a filter time for motor speed feedback used for control
(90.01 Motor speed for control).
3 ms
0 … 10000 ms Motor speed filter time. 1 = 1 ms
No. Name/Value Description Def/FbEq16
Bit Name Value
0 Encoder 1
feedback
1 = Encoder 1 selected as load feedback source
1 Encoder 2
feedback
1 = Encoder 2 selected as load feedback source
2 Internal position
feedback
1 = Internal load position estimate selected as load feedback source
3 Motor feedback 1 = Motor feedback selected as load feedback source
4 Pos counter init
ready
0 = Position counter not initialized, or encoder feedback was lost.
Fresh counter initialization recommended.
1 = Position counter successfully initialized
5 Position counter re-
init disabled
1 = Position counter initialization is being prevented by par. 90.68
6 Position data
inaccurate
1 = Encoder feedback intermittent or lost. (If the drive is running,
estimated position is used whenever encoder feedback is
unavailable. If the drive is in stopped state, position counting will
continue based on encoder data after the connection is restored.)
7…15 Reserved

 Loading...
Loading...











