Disassembly/Assembly
Guidelines
IRB 6400
Page 11 - 14
Robot Calibration
Precision Resolver Calibration Procedure
The precision resolver calibration procedure is used
when proper alignment after a motor replacement is
critical. An example of a program that would need the
precision resolver calibration procedure is a program
that run many different part routines. To perform this
procedure it is required to use the calibration equipment
(3HAA 0001-MZ). Also needed to accomplish this
procedure will be digital leveling equipment. This
equipment does not come with the robot. This equipment
can be purchased through ABB.
The only time that the resolvers should be calibrated
using this method is when the resolver has been
mechanically disassembled from the mechanical
unit. (Such as if a motor is removed.)
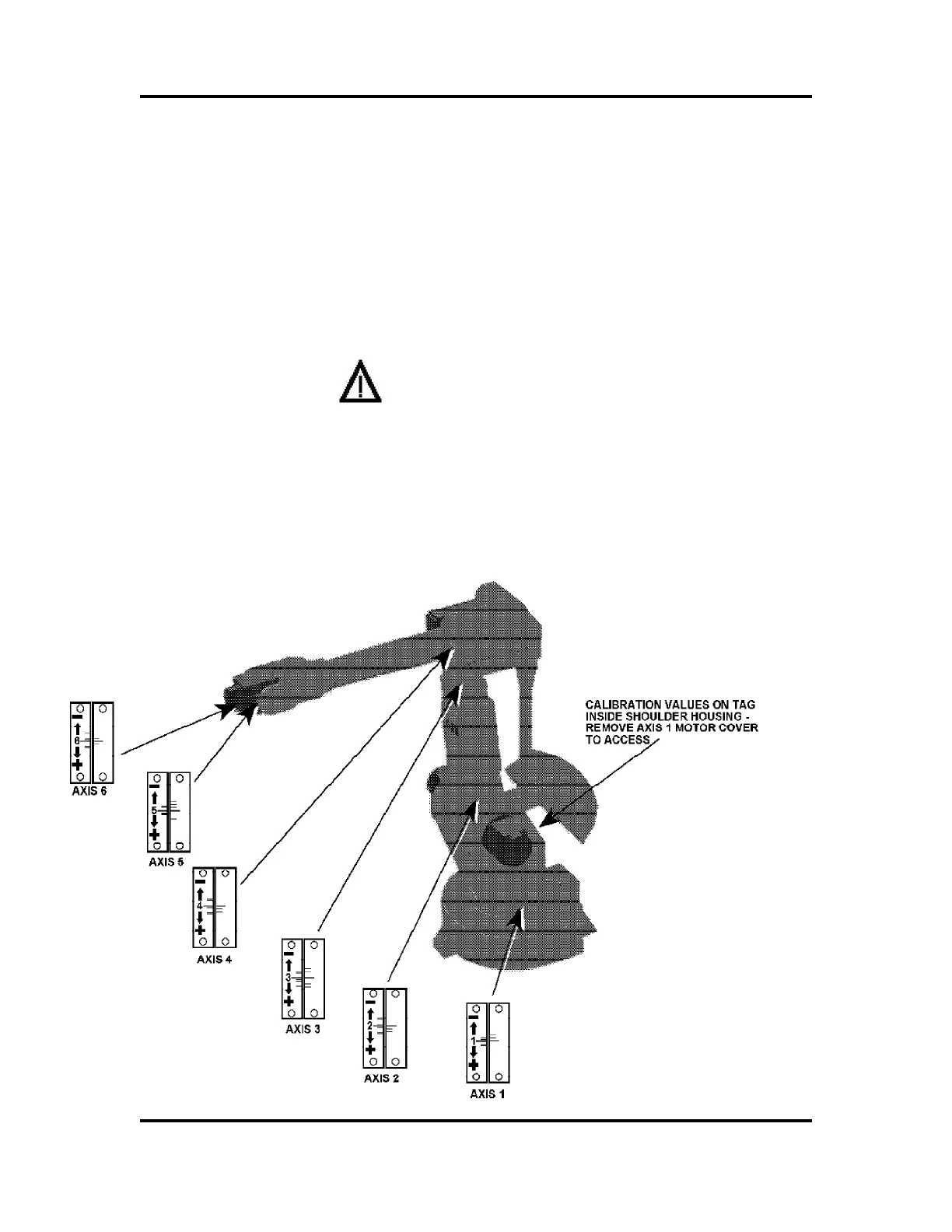
Adjust axes in increasing sequence, i.e., 1, 2, 3, 4, 5,
then 6.
1. Position the robot approximately in calibration
position 0 as shown below.

 Loading...
Loading...







