Disassembly/Assembly
Guidelines
IRB 6400
Page 5 - 1
Axis 1 Guidelines
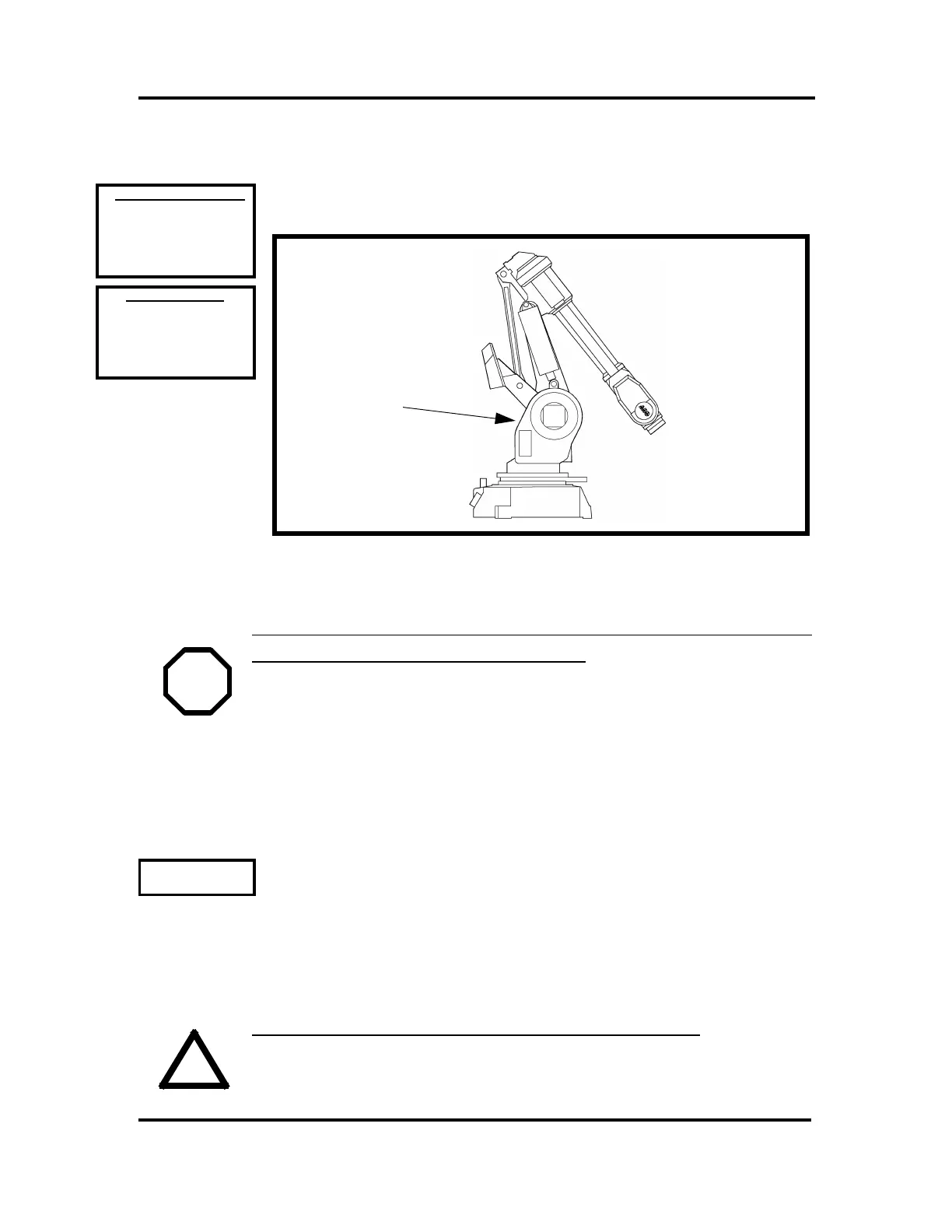
MOTOR (S16) Removal
1. POSITION ROBOT SO COUNTERBALANCE WEIGHT IS RAISED UP
HIGH ENOUGH TO GAIN EASY WORKING ACCESS THROUGH
COVER (S43).
2. TURN ELECTRICAL DISCONNECT SWITCH OFF AND LOCK IT IN
THE OFF POSITION.
WARNING! BE SURE ELECTRICAL DISCONNECT SWITCH IS
OFF AND LOCKED IN OFF POSITION!
3. REMOVE SCREWS (S42) AND COVER (S43).
4. REMOVE TIE WRAP (S23), SCREW (S24), AND HOLDER (S25).
5. DISCONNECT MOTOR SIGNAL CABLE R3.FB1 (S22) AND MOTOR
POWER CABLE R2.MP1 (B18) FROM MOTOR (S16).
6. REMOVE MOTOR (S16) FROM ROBOT:
a. Remove (4) screws (S13) and (4) washers (S15).
b. Use two M8 x 40 screws in threaded holes in motor mounting
flange to loosen motor mounting. Permatex (S17) was used to
install motor and mounting joint will be hard to break free.
c. Carefully lift motor (S16) straight up and out of robot.
CAUTION: DO NOT TAP OR HIT MOTOR SHAFT.
d. Cover cavity to prevent objects from falling in.
E
E
REFERENCE DRAWINGS
Exploded Views:
Assembly:
3HAB4161-4 ( pg 13-1)
REQUIRED TOOLS
“B” (pg 5-17,12-1)
Hand Tools
“S” (pg 5-18,12-2)
Small 3-Jaw Puller
Strap Wrench
M10x150 Screw
M8x40 Screws (2)
Torque Wrench (52-224 ft-lb)
C
RAISE WEIGHT
FOR EASY
ACCESS
THROUGH
COVER (S43)
MOTOR WEIGHS
APPROX. 50 LB.

 Loading...
Loading...







