Disassembly/Assembly
Guidelines
IRB 6400
Page 11 - 16
Robot Calibration
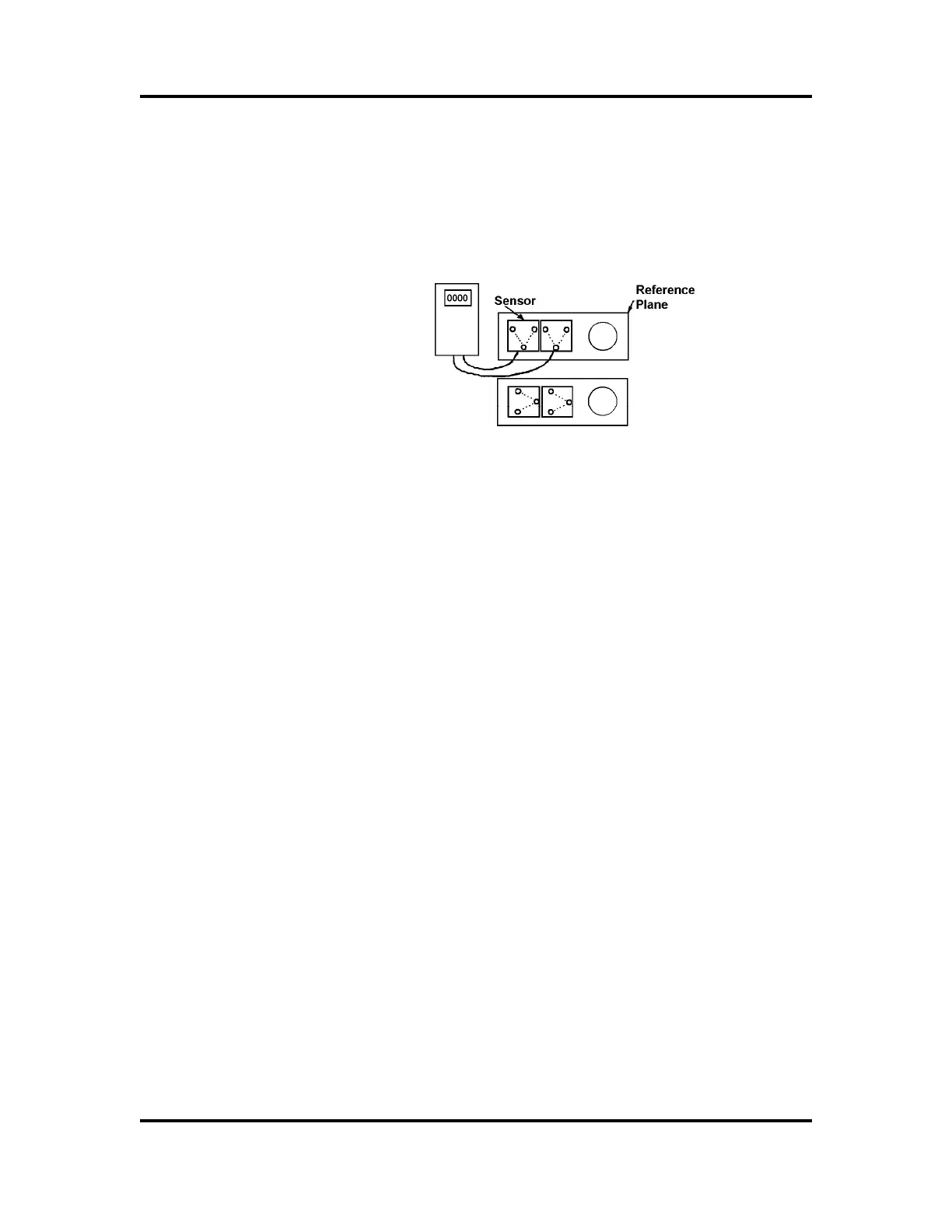
Precision Resolver Calibration Procedure (Cont)
Calibrate the sensors against each other using a
reference plane surface in the same direction. The
sensors must be calibrated every time they are
used for a new direction.
Figure 2 - Calibrating the Sensors
Calibrating Axis 2-6
7. Release the enabling device.
8. Mount sensor fixture (6896 0011-GM) on the base
reference plane.
9. Mount elbow fixture (6896 0011-LP) on the lower
arm calibration plane.
10. Mount sensor fixture (6808 0011-GM) on the wrist
calibration plane turned upwards.
11. Mount intermediate plate (6896 134-GZ) on the
turn disc. Mount elbow fixture (6808 0011-GU) on
the intermediate plate. Note that the elbow fixture
position is adjusted with a guide pin.
12. Mount inclination instrument (6807 081-D). One
sensor is to be mounted on the reference plane and
the other on the elbow fixture for Axis 2. Both
sensors are to be positioned in the same direction.
See also Figure 3.
NOTE: The sensor unit must always be mounted on
top of the fixture.

 Loading...
Loading...







