Disassembly/Assembly
Guidelines
IRB 6400
Page 5 - 13
Axis 1 Guidelines
10. DISCONNECT BEARING (S46) FROM BASE HOUSING (B24):
a. Remove screws (S44) and washers (S45) holding bearing (S46)
to base housing (B24).
11. REMOVE SYNC PLATE BRACKET AT LEFT SIDE, TOP OF BASE
HOUSING (B24).
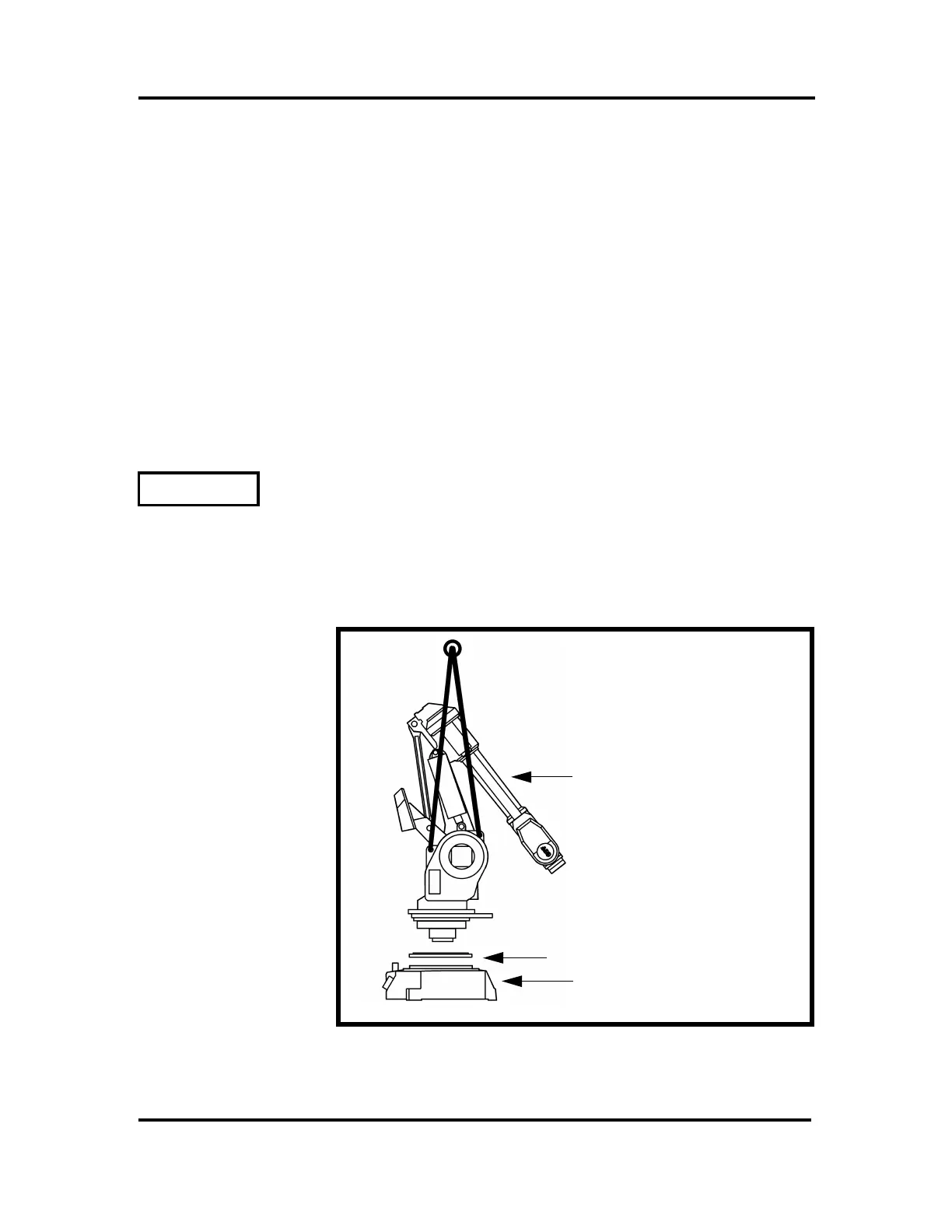
12. LIFT ROBOT OFF BASE HOUSING (B24):
a. Carefully lift robot straight up, pulling bearing (S46) out of its bore
in base housing (B24). If necessary, adjust lifting cable lengths to
ensure robot is lifted up with bearing square to its bore in base.
b. Set robot on safe supports that allow access to remove bearing
(S46) from underneath.
c. DO NOT remove lifting equipment. Use it to add to the safety of
supporti6g the robot.
13. REMOVE BEARING (S46) FROM FRAME HOUSING (S21):
a. Prepare to catch bearing (S46) when it comes loose.
b. Remove screws (S48) and washers (S46).
c. Remove bearing (S46).
LIFT ROBOT STRAIGHT UP
BEARING (SHOWN REMOVED)
BASE
BEARING WEIGHS
APPROX. 50 LB.

 Loading...
Loading...







