Customer settings M0041
Process controller M0742
Modulating behaviour M0887
Default value: PI controller
Setting values:
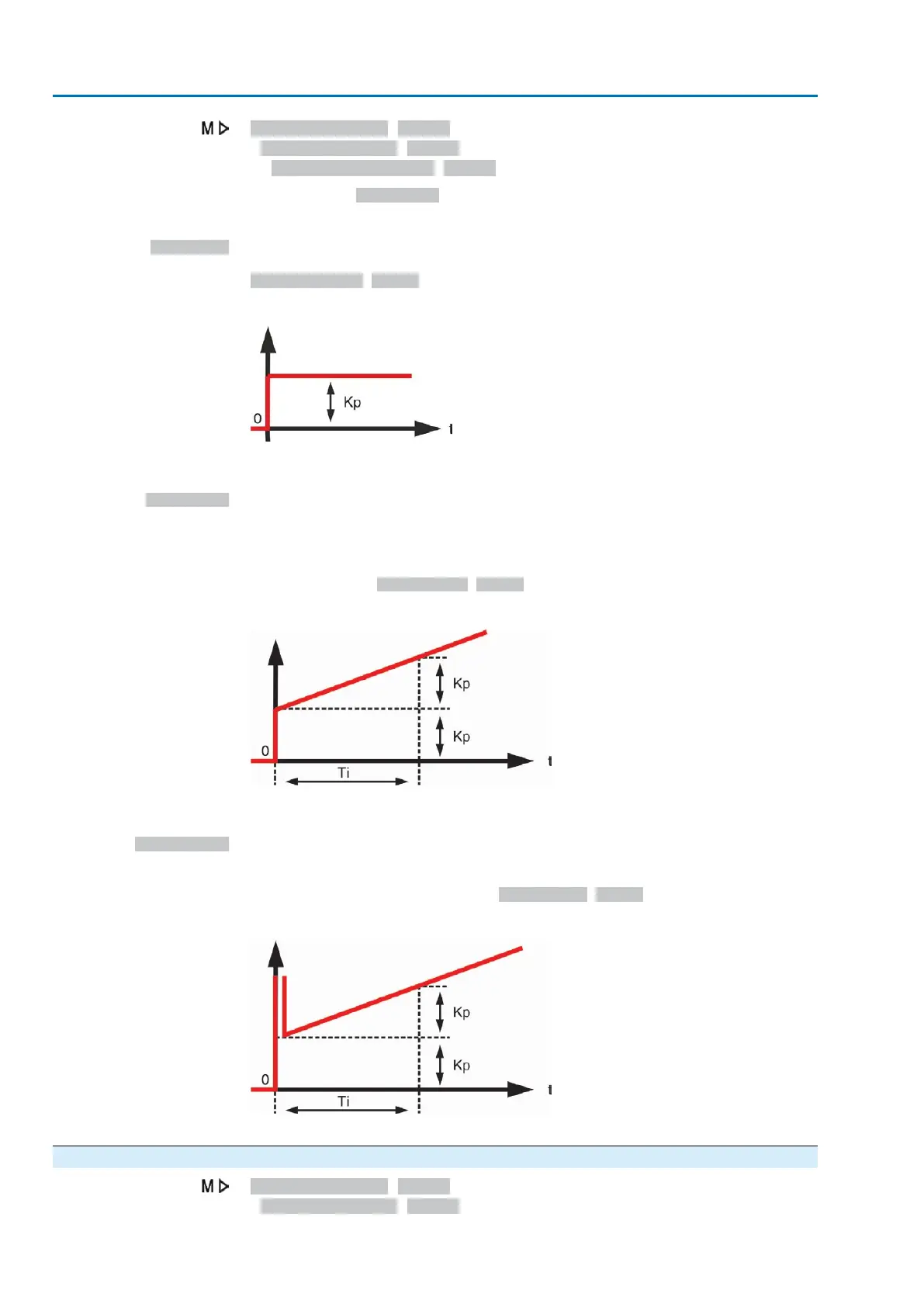
P controller
P controller immediately reacts to a control deviation (i.e. actively) and amplifies the
input signal (error variable) proportionally to the set amplification. Setting parameter:
Proport. gain Kp M0744
Figure 42: Step response of P controller
P controller application
For uncritical closed-loop applications allowing to accept continuous error variables
in the event of failures, e.g. pressure, flow, filling level and temperature control.
PI controller
PI controllers consist of a P fraction immediately reacting to a control deviation and
an I fraction for chronological integration of the input signal (error variable). Due to
the additional time constant of the I fraction, the output value takes more time to
reach the target status (i.e. inertia of control loop response) whereas positioning
accuracy increases at the same time (lower control deviation). Parameters for setting
the time constant: Reset time Ti M0745
Figure 43: Step response of PI controller
PI controller application
Quick control circuits not allowing continuous error variables, e.g. pressure,
temperature and ratio control.
PID controller
Compared to the PI controller, the PID controller has an additional D fraction
accounting for changes in the error variable (change rate). The D fraction quickly
reacts to changes, even to minor control deviations with large output values.
Parameter for setting the D fraction: Rate time Td M0746
Figure 44: Step response of PID controller
PID controller use
For precise and highly dynamic control not allowing a continuous error variable.
8.6.3. Setpoint source (input for process setpoint)
Customer settings M0041
Process controller M0742
60
Actuator controls
Application functions ACV 01.2/ACVExC 01.2

 Loading...
Loading...







