Baumer_EAx_EtherNetIP_EN_MNL 38/81 www.baumer.com
02.20
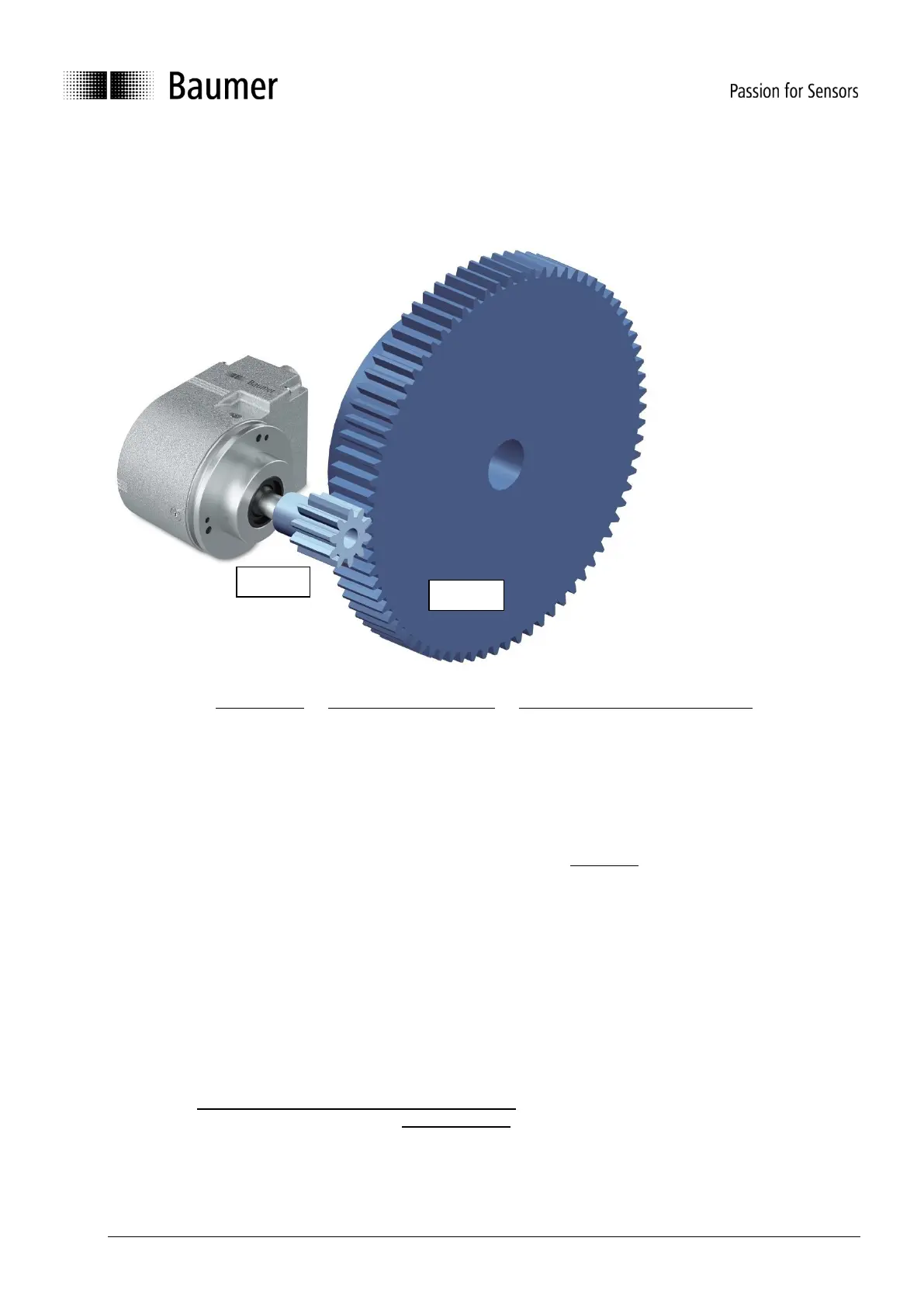
7.6.8. Gear factor: activation
With gear factor active the encoder is mechanically mounted on the primary side (drive side) of the gearbox
while it outputs position data as if it was mounted on the secondary side (driven side) of the gearbox. The
parameter „total measuring range“ always defines the number of requested steps for one revolution on the
secondary side of the gear box.
The values for numerator and denominator of the gear factor result directly from the number of teeth. In the
example above the number of teeth at the driven side is 75. At the drive side the number of teeth is 10.
Parameter „measuring units per revolution“ is not set in the gear factor function. Instead the parameter
„measuring units per revolution“ results from total measuring range, numerator and denominator.
Example:
The gear factor shall be 75:10 (means 7,5).
The resolution on the secondary side of the gearbox shall be “1 revolution = 10000 steps”.
The numerator is 75 and the denominator is 10. Only integer values are admissible for numerator
and denominator. The total measuring range is 10000.
The encoder turns 7,5 revolutions for one revolution on the secondary side of the gearbox. The
resulting value of „measuring units per revolution“ for the encoder is 10000 / 7,5 = 1333,3333.
Note:
A change of Instance Attribute 102 - Gear Factor Activation clears internal position offsets (if any). So the
current position reference is lost (see also Preset function).
The gear factor functionality is also called „numerator/denominator scaling“ or „round axis function“.