Baumer_EAx_EtherNetIP_EN_MNL 41/81 www.baumer.com
02.20
7.6.15. Parameterization behaviour
The following chapter applies for all parameters of the Position Sensor Object marked with a “(c)” (see
Instance Attributes).
Parameterization via Configuration Assembly
A parameterization during start up is possible via the configuration assembly (see Instance (105) -
Configuration). All parameters of the assembly are immediately applied and stored during connection
establishment.
Parameterization via Acyclic Services
Depending on Attribute 110 (see Instance Attribute 110 - Set Parameter Non-Volatile) the acyclic encoder
parameterization changes. Both parameter behaviours are described the next chapters.
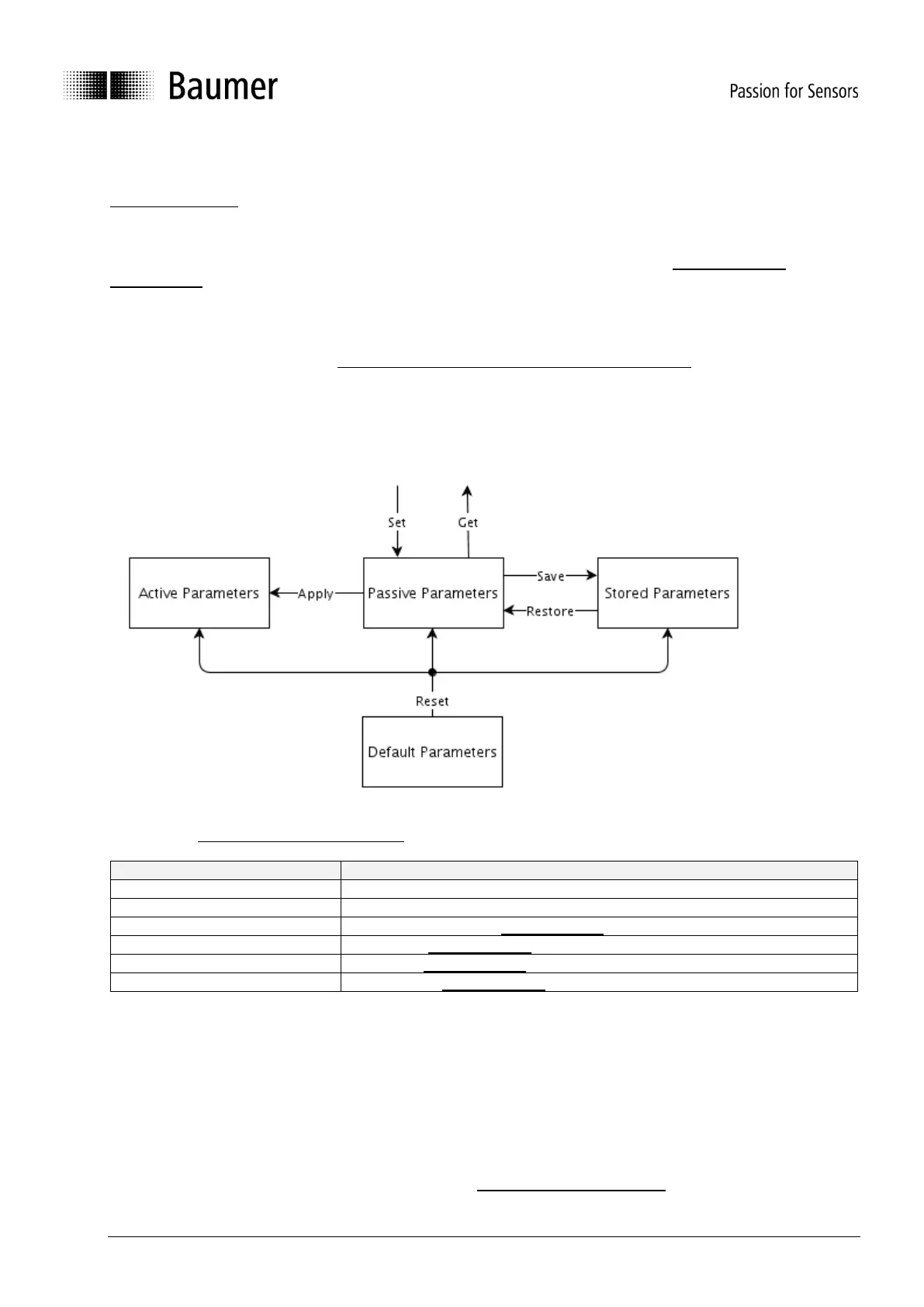
Default Parameter Behaviour
If attribute 110 has the value 0 (factory setting) the following parameter behaviour is valid:
The encoder works with the “Active Parameters”. The transitions can be executed by the according services
described in Position Sensor Object (0x23).
Alternative Parameter Behaviour
If attribute 110 is set to 1 the alternative parameter behaviour is applied. Parameters become active and are
stored immediately at the time when they are set. The following transitions (services) are no longer
accessible:
Apply
Save
Restore
The parameterization has to be done as described in Parameterization sequence.