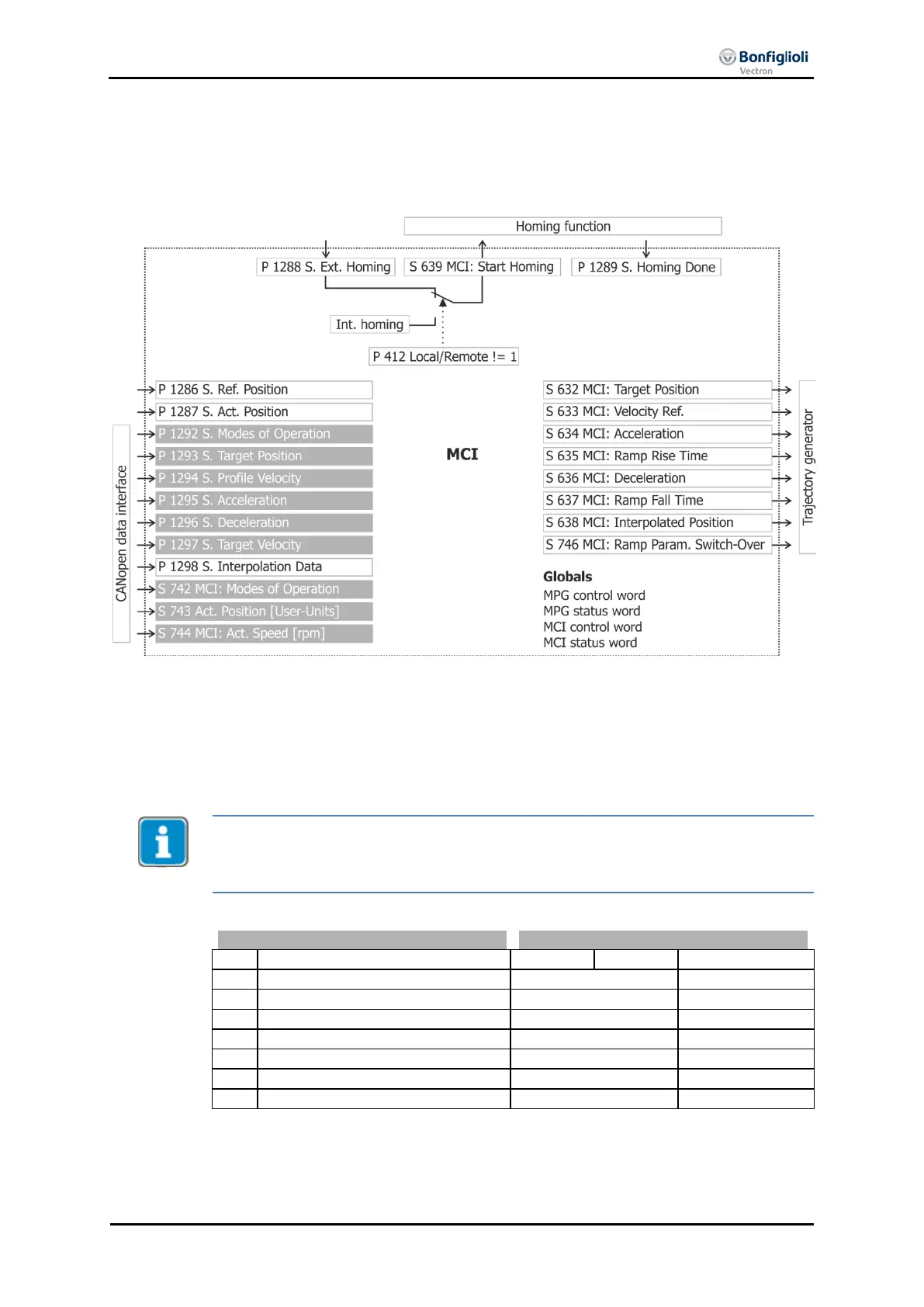
The following graph shows the parameters (P) and sources (S) which are used for de-
fining the Motion Control Interface.
10.5 Motion Control Override
The Motion Control Override feature can be used for specifying a travel profile via seri-
al communication (VABus or Modbus). This enables testing of
VPlus user software for Windows when the controller has not yet been completely pr
o-
grammed. This function can also be used as a simulation mode.
The Function Motion Control Override do not support the following modes:
• Interpolated Mode.
• Cyclic Synchronous Position Mode
• Cyclic Synchronous Velocity Mode
Override Modes Of Operation
Override Profile Velocity
Override Profile Acceleration
Override Profile Deceleration
Override Target Velocity vl [rpm]
Override Target Velocity pv [u/s]
10/13 CM-PROFINET 61
 Loading...
Loading...



