“Target reached/In Gear” is set when the electronic gear function is used and electronic
gear synchronous running is reached.
Setting
Halt “
1” will stop a currently executed movement. The axis is stopped at ramp
Override Profile Deceleration
1458. “Target reached” is set to “0” to start the dece
l-
eration and to “1” when the
speed reaches value 0. The drive remains in “Operation
To continue the interrupted movement, reset
Halt
to “0”. Bit “Target
reached” is set to “0” to start the acceleration and to “1” when the conditions for “Gear
in” of
parameters
1168 and
1169 are reached.
With the phasing function, the slave position is offset from the master position received
by the value of Phasing: Offset 1125.
Phasing is described above in this chapter.
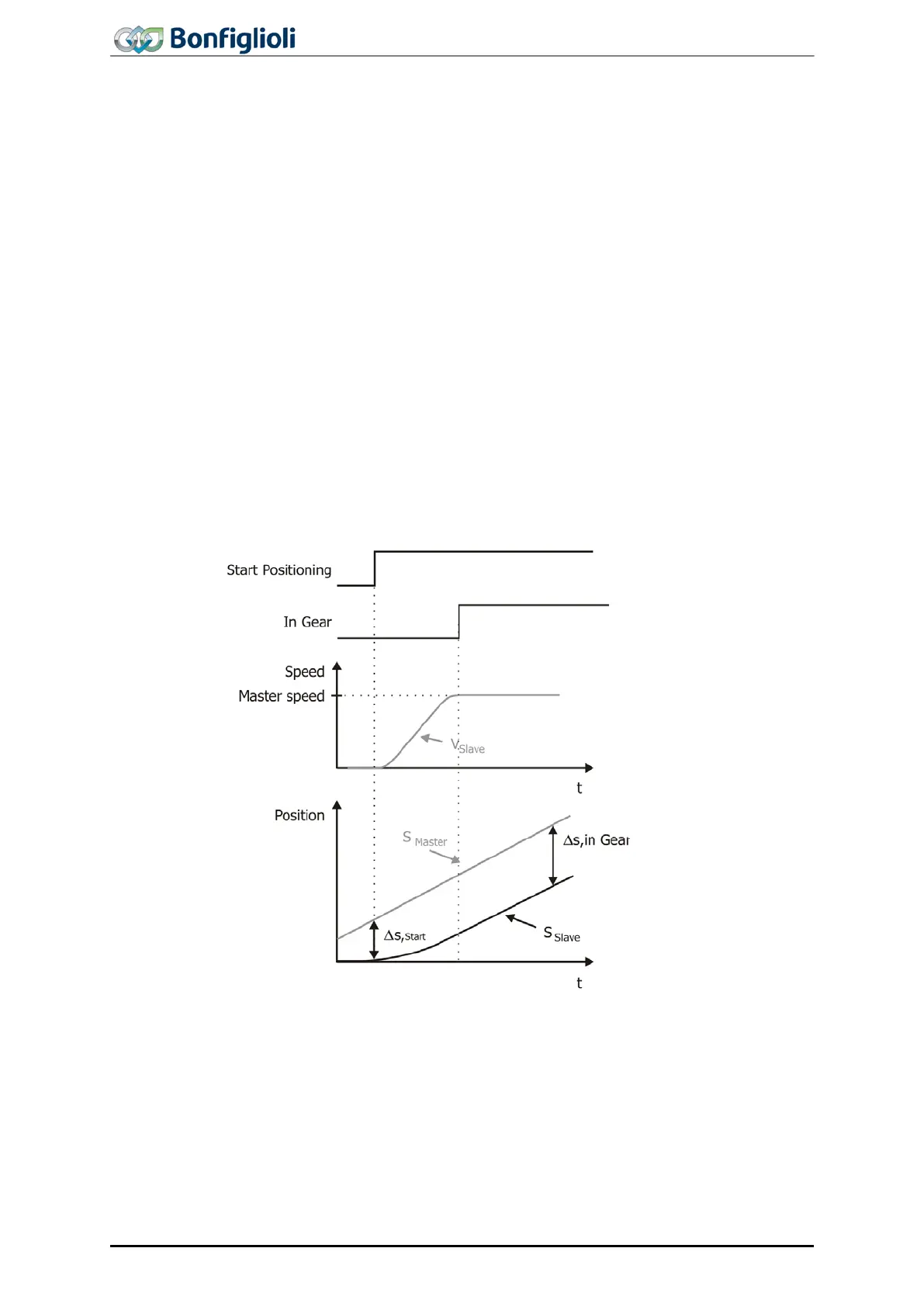
Function without direct synchronization
(“Standard Synchronization“)
The drive accelerates the master speed at the ramps parameterized in the motion
block. As soon as the master speed is reached for the first time, the drive is synchro-
nized
with the master drive. The slave is engaged at the current position and operates
at a synchronous angle with the master. In the case of a relative positioning operation,
this engaging position is used as the start position.
The acceleration and decelerati
on for synchronizations follow an S-curve.
The relative position change due to acceleration is not compensated.
114
ACU
Modbus/TCP 10/13