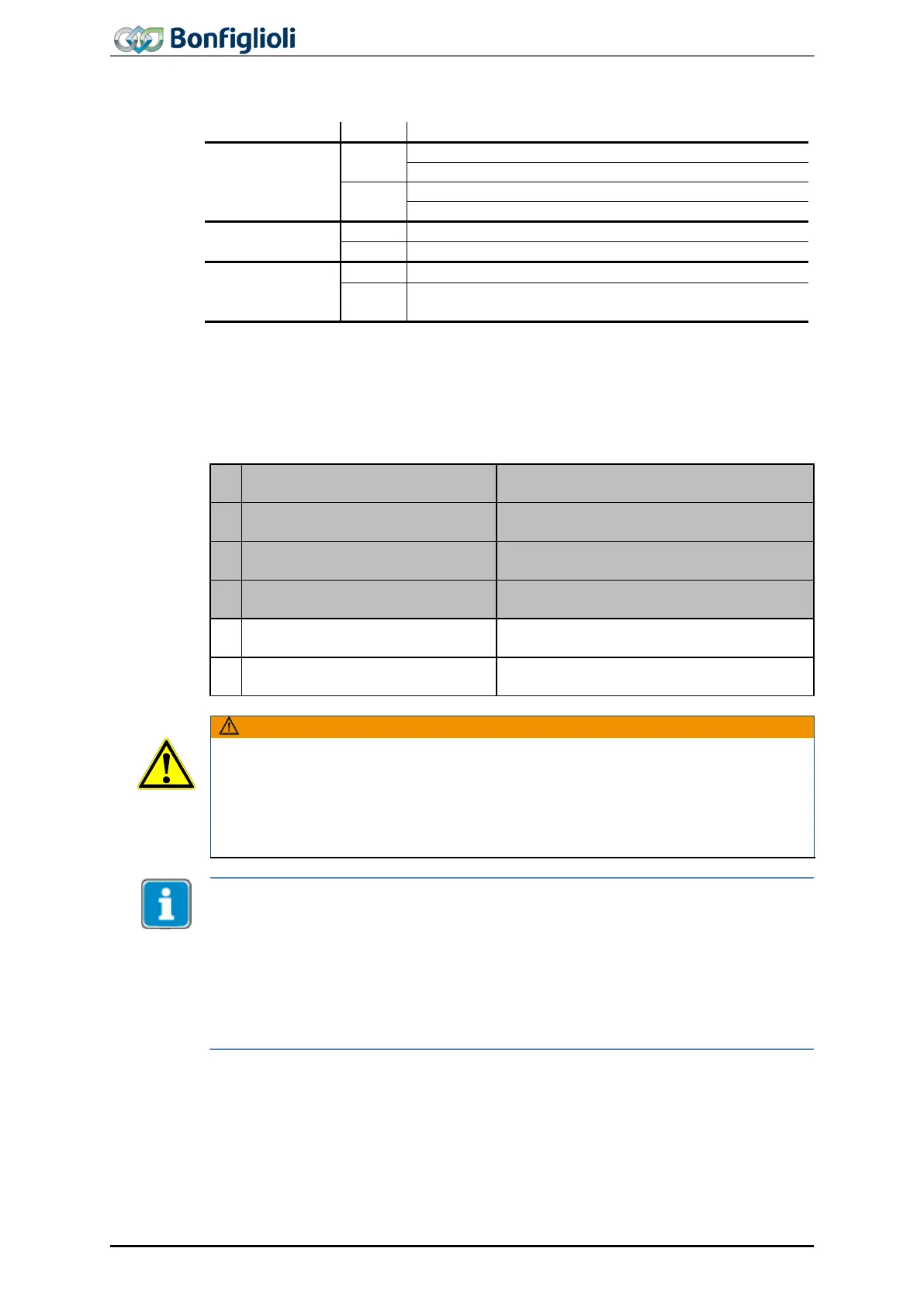
Bit 10
Halt = 0: Home position (still) not reached.
Halt = 1: Axis decelerated.
Halt = 0: Home position reached.
Halt = 1: Axis has speed 0.
Bit 12
Homing not completed yet.
Homing completed successfully.
Bit 13
Homing error occurred,
homing not completed successfully.
For a description of homing operations, refer to the Application manual “Positioning”.
11.4.4.1 Example sequence
In order to start “homing mode”, the correct sequence must be sent by the PLC.
Enable operation and start homing.
Operation enabled and homing attained.
Dangerous state due to new mode!
If
Override Modes Of Operation 1454 is changed during operation (control word =
0xnnnF), a dangerous state may occur in the new mode.
• Before changing
Override Modes Of Operation 1454
,
check the status word
(e.g. for status 0xnn33).
Once the sequence of the first four status words has been processed correctly, the ACU
is ready for operation (dark table area).
In state “operation enabled” (0xnnnF), the state of the Motion Control can be changed
(white table area).
With control word transition from 0x0007 (or 0x000F) to 0x001F the homing opera
tion
is started. “Home position set”
- Bit 12 returns the status in the status word.
As long as 0x0007 is active, the “Modes of Operation” can also be changed safely. Once
Override Modes Of Operation
1454
has been set to another value, operation can be
started with a corresponding sequence.
96
ACU
Modbus/TCP 10/13