INSTALLATION MANUAL
CMA-5024 GLSSU
This document includes Proprietary Information and shall not be reproduced or communicated to third party
without prior written permission by CMC Electronics Inc.
Page E.16
November 21, 2008
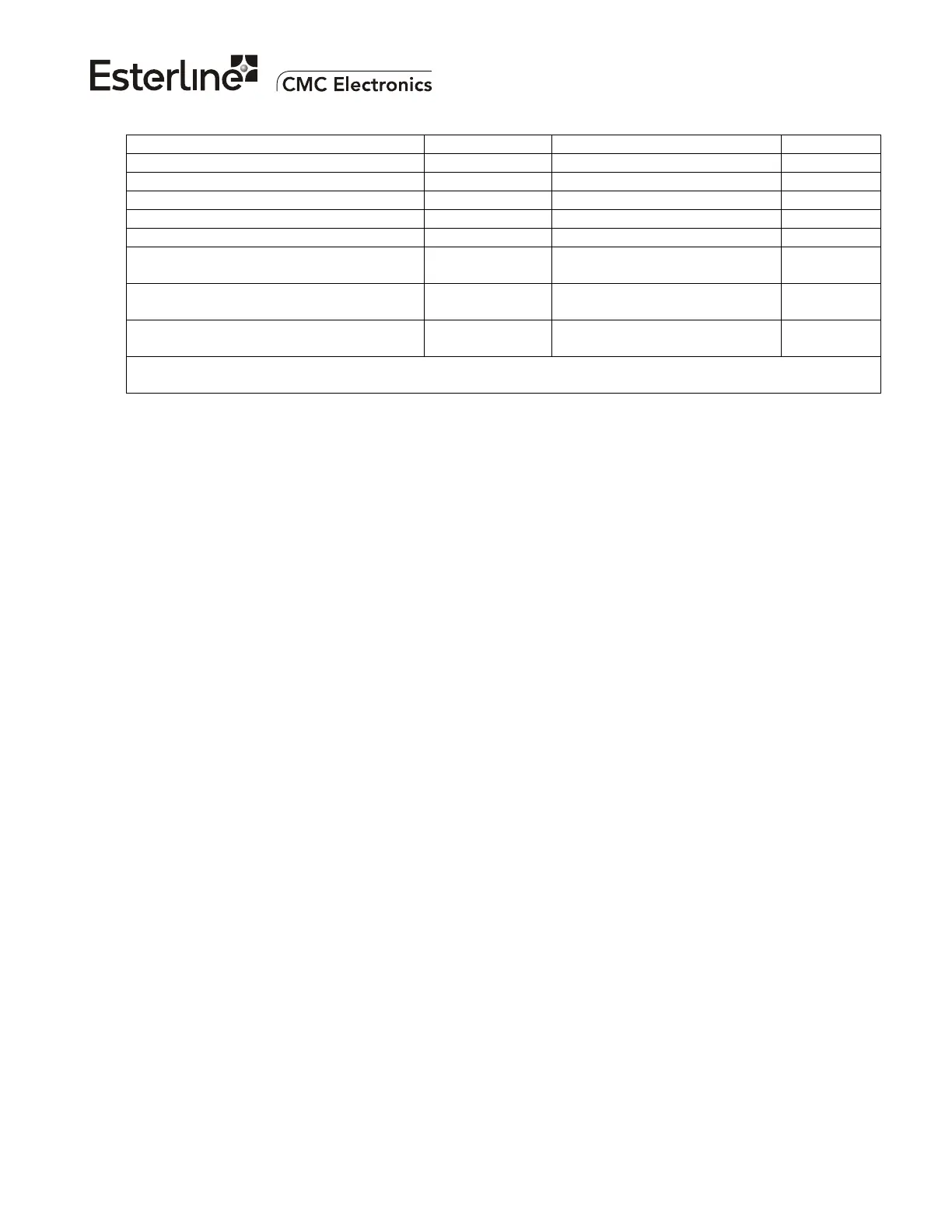
PARAMETER EXAMPLE* RANGE / RESOLUTION Units*
Vertical SBAS Selection Threshold 50 +500 / 1 meter 1 m
Approach Monitor Deactivation Threshold 0.5 +4.00 / 0.01 nm 0.01 nm
SBAS PA Mode Range Limit 100 +200 / 1 nm 1 nm
GPS Bus Equipment ID 00B +FFF / 1 hexadecimal
GLS Bus Equipment ID 00B +FFF / 1 hexadecimal
GLS/GPS ARINC 429 Output #1 Bus
Type
1 1 = GPS to 2 = GLS / 1 integer
GLS/GPS ARINC 429 Output #2 Bus
Type
1 1 = GPS to 2 = GLS / 1 integer
GLS/GPS ARINC 429 Output #3 Bus
Type
1 1 = GPS to 2 = GLS / 1 integer
* The parameters are scaled and truncated as indicated above in the "Units" column. For example a Default
Aircraft Pitch value of +44.99 deg will be recorded in the APD file as "+449" in 0.1 deg units.
(1) Navigation Center Lever Arm Coefficients
There are 3 sets of 3 Navigation Center Lever Arm Coefficients selected by the SDI setting
of the GLSSU. Using an (X, Y, Z) set of (0, 0, 0) will result in a navigation center at the GPS
antenna position irrespective of the setting of the Navigation Center Position Output on GLS
Bus APD; such a set is used when no conversion is required. The X coefficient is the
distance along the longitudinal axis of the aircraft between the navigation center and the
antenna phase center (positive for a GPS antenna in front of the Navigation Center). The Y
coefficient is the distance along the lateral axis of the aircraft between the navigation center
and the antenna phase center (positive for a GPS antenna left of the Navigation Center as
viewed by an observer at the back of the aircraft facing the nose). The Z coefficient is the
distance along the vertical axis of the aircraft between the navigation center and the antenna
phase center (positive for a GPS antenna below the Navigation Center).
The use of lever arm coefficients depends on the size of the aircraft and the relative position
of the antenna. The definition of these coefficients conforms to attachment 5-2 of ARINC
755-3.
(2) Default Aircraft Pitch
The default Aircraft pitch is used to convert the antenna position to the navigation center
when the Attitude Data Used APD is Off. The normal aircraft pitch angle during an approach
is obtained from the APD encoded in the APD.
(3) Minimum Ground Speed for Track Angle Output
As the ground speed decreases, the accuracy of the Track Angle obtained from the
North/East components of velocity degrades. Below the value specified in Minimum Ground
Speed for Track Angle Output APD, the SSM of the GPS Track Angle output label 103 will
be set to NCD. The recommended value is 7 knots.
(4) Cross-Check Minimum HIL/VIL
The Cross-Check Minimums are used when the Cross-Check APD is On to set a minimum
horizontal/vertical error below which the cross-check is considered to pass. This minimum is
set based on the accuracy of the Navigation Center position computation to avoid a false
detection in the cross-check. This is especially important when no lever arm coefficients are
provided or when attitude data is not available.
The document reference is online, please check the correspondence between the online documentation and the printed version.

 Loading...
Loading...