Curtis 1232E/34E/36E/38E & 1232SE/34SE/36SE Manual, os 30
31
24 NOVEMBER 2015
3 — PROGRAMMABLE PARAMETERS: Speed Controller Parameters (SPEED MODE)
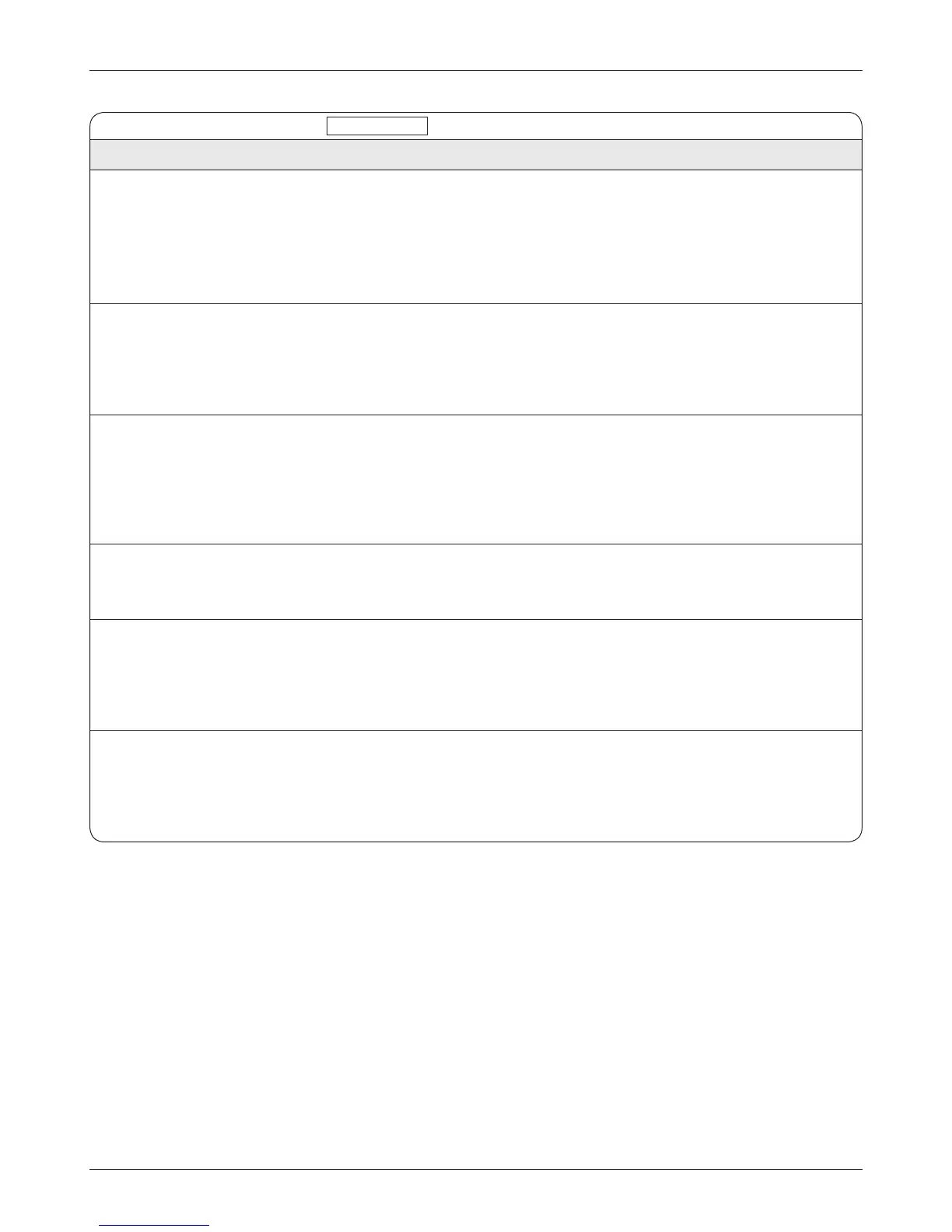
1 – SPEED MODE SPEED CONTROLLER MENU
ALLOWABLE
PARAMETER RANGE DESCRIPTION
Max Speed 100–8000rpm Denesthemaximumrequestedmotorrpmatfullthrottle.Partially-applied
Max_Speed_SpdM 100 – 8000 throttle is scaled proportionately; e.g., 40% applied throttle corresponds to
0x3011 0x00 a request for 40% of the set Max Speed Value.
If Max_Speed_SpdM is set <100 rpm (through VCL or CAN), the throttle
requestiszeroed.
Note: The maximum motor rpm is subject to the constraints on page 29.
Kp 0 – 100 % Determines how aggressively the speed controller attempts to match the speed
Kp_SpdM 0 – 8192 of the motor to the commanded speed. Larger values provide tighter control.
0x3012 0x00 If the gain is set too high, you may experience oscillations as the controller
tries to control speed. If it is set too low, the motor may behave sluggishly and be
difculttocontrol.
Ki LS 5 – 100 % The Ki LS parameter sets the Ki for low vehicle speeds. The integral term (Ki)
Ki_SpdM 50 – 1000 forceszerosteadystateerror,sothemotorwillrunatexactlythecommanded
0x3015 0x00 speed. Larger values provide tighter control.
If the gain is set too high, you may experience oscillations as the controller
tries to control speed. If it is set too low, the motor may take a long time to
approach the exact commanded speed.
Ki HS
5 – 100 % The Ki HS parameter sets the integral term (Ki) for high vehicle speeds; see
Ki_HS_SpdM 50 – 1000 description of Ki LS.
0x301D 0x00
Following Error Limit 0–6000rpm Denesthemaximumdifferencethatwillbeallowedbetweenthecommanded
Following_Error_Limit 0 – 6000 motor speed trajectory and the actual motor rpm. The real-time difference is
0x3035 0x00 displayed in Monitor Motor Tuning Following Error.
If the Following Error Limit is exceeded for the Following Error Time,
a Following Error Fault (fault code 48) is declared.
Following Error Time
500–5000ms DenesthemaximumtimetheFollowingErrorLimitcanbeexceeded
Following_Error_Time 250 – 2500 before a Following Error Fault is declared.
0x38C0 0x00 Following Error Time must be set long enough for the motor speed
to decelerate and accelerate to maximum speed in the opposite direction
during a direction reversal under the worst case conditions.