52
Curtis 1232E/34E/36E/38E & 1232SE/34SE/36SE Manual, os 30
24 NOVEMBER 2015
3 — PROGRAMMABLE PARAMETERS: Proportional Driver Parameters
* These parameter descriptions assume the proportional driver
is being used to drive a proportional valve, and that the PD
current control software is active (PD_Enable = On).
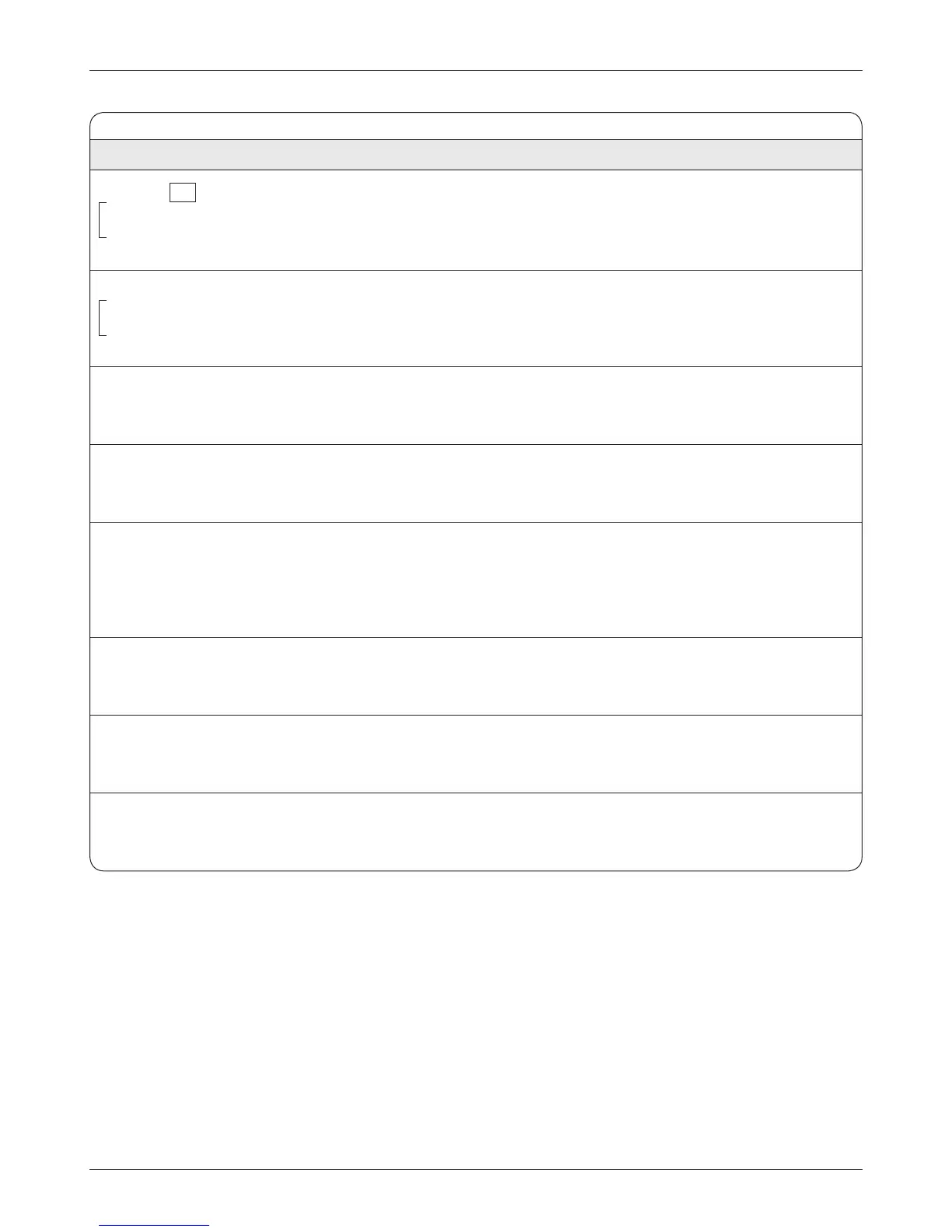
DRIVERS: PROPORTIONAL DRIVER MENU
ALLOWABLE
PARAMETER RANGE DESCRIPTION
PD Enable On / Off Determines how the PWM of the proportional driver is controlled.
PD_Enable On / Off WhenprogrammedOn,itiscontrolledbythecontroller’sPDcurrentcontrol
OptionBits1 [Bit 6] software. When programmed Off, it is controlled by the VCL function
0x306A 0x00 Put_PWM (PWM5, value); see Figure 17, page 119.
Hyd Lower Enable
On / Off When programmed On, lowering is controlled by throttle position.
Hyd_Lower_Enable On / Off When programmed Off, lowering is controlled by the VCL variable VCL_PD_
OptionBits1
[Bit 7] Throttle; see Figure 17, page 119.
0x306A 0x00
PD Max Current 0.00 – 2.00 A
*
The Lower speed is determined by the aperture of the proportional valve.
PD_Max_Current 0 – 607 This parameter sets the maximum allowed current through the valve,
0x3040 0x00 whichinturndenesitsaperture.
PD Min Current 0.00 – 2.00 A
*
Sets the minimum allowed current through the proportional valve.
PD_Min_Current 0 – 607 Mostproportionalvalvesneedanon-zeroclosedcurrentinordertostart
0x3041 0x00 opening immediately when Lower is requested.
PD Dither % 0 – 100 %
*
Dither provides a constantly changing current in the coil to produce a rapid
PD_Dither_Percent 0 – 32767 back-and-forth motion of the valve; this keeps the valve lubricated and
0x3042 0x00 allowslow-friction,precisemovement.ThePDDither%parameterspecies
the amount of dither as a percentage of the PD max current, and is applied
in a continuous cycle of add%-subtract%.
PD Dither Period 16 – 112 ms
*
Sets the period for proportional valve dither.
PD_Dither_Period 1 – 7
0x3043 0x00
PD Kp 1 – 100 %
*
Sets the proportional gain of the current feedback controller. Higher gains
PD_Kp 82 – 8192 force the control loop to respond quickly but may cause oscillations.
0x3044 0x00
PD Ki 1 – 100 %
*
Sets the integral gain of the current feedback controller. Integral gain tries
PD_Ki 327 – 32767 toforcetheerrortozero.Highergainsforcethecontrollooptorespond
0x3045 0x00 quickly but may cause oscillations.
pcf