Curtis 1232E/34E/36E/38E & 1232SE/34SE/36SE Manual, os 30
119
24 NOVEMBER 2015
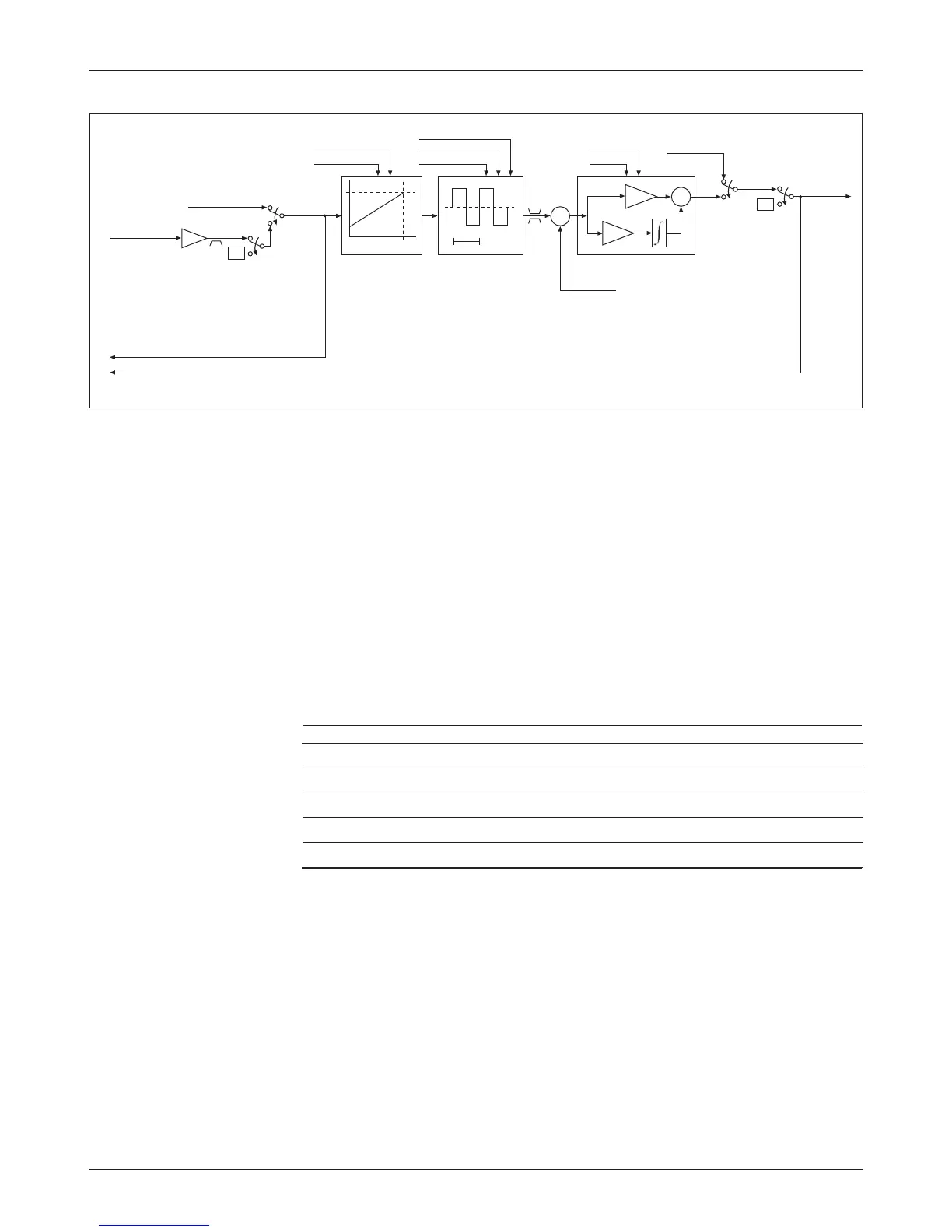
function. Note that Mapped_rottle is inverted; lowering its value (making
it more negative) increases the PD_rottle value.
e Dither function adds and subtracts from the current command to
the PD based on PD_Dither_Percent, at a rate set by PD_Dither_Period.
e dithered current command is compared to the present PD_Current
and the error is fed into a PI controller. e feedback gains are set by the
parameters PD Kp (proportional gain) and PD Ki (integral gain). e nal
output is the VCL variable PD_Output, which is displayed in the 1313/1314
programmer’s Monitor
» Outputs menu as PD PWM.
e following PD processing variables are accessible by VCL.
vcl variable access description
Mapped_Throttle Read Only Command from throttle section
VCL_PD_Throttle Read/Write VCL-accessible PD command
PD_Throttle Read Only Resultant command to the PD
PD_Current ReadOnly AveragecurrentowinginthePD
PD_Output Read Only Resultant PWM at PD output
8 — VCL
Fig. 17 Proportional driver processing.
+
+
Mapped_Throttle
PD_Throttle
-1
PD_Current
Ki
Kp
+
-
VCL_PD_Throttle
2A
0A
PD_Output
PD Enable
= On
PD PWM
PD Throttle
327670
0%
Dither Period
+ %Dither
- %Dither
Current Mapping
Dither PI Control
PD Max Current
PD Min Current
PD Dither Period
PD Dither Percent
PD Kp
PD Ki
Put_PWM(PWM5,xxxx)
Hyd
Lower
Enable = On
ShutdownPD
0%
ShutdownThrottle
or
ThrottleInvalid
or
(CANopen Interlock = On
and
CAN NMT State = Pre-operational)
0%
PD Max Current
Italics = Other R/W Variables Bold Italics = Monitor VariablesBold = Parameters
 Loading...
Loading...




