SCARA ROBOT DCS ELECTRIC CONTROL INSTRUCTIONS
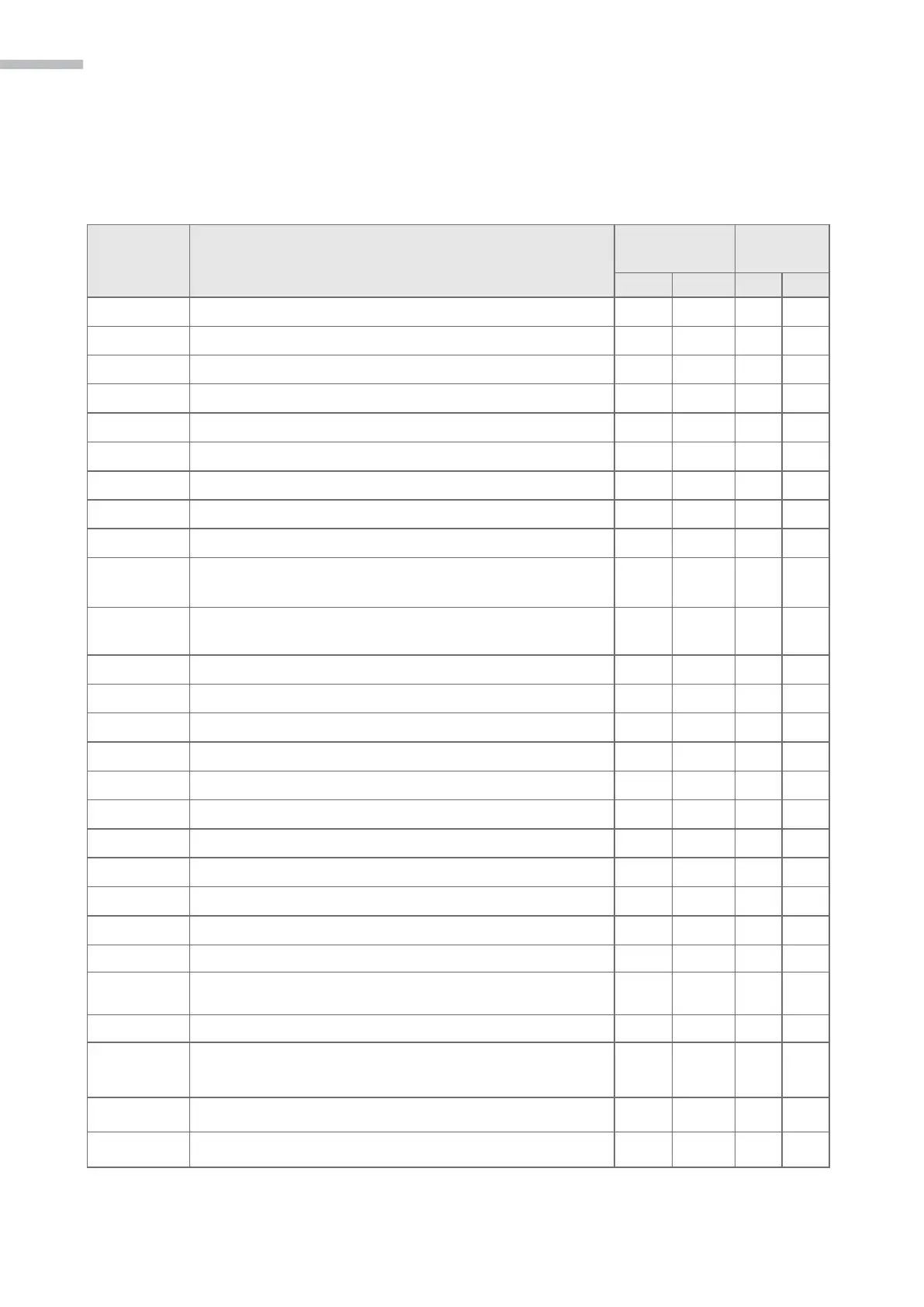
6.4 Index of alarm
6.4.1 Group type
Axis did not return to the origin
Incompatible motion command
Motion command is not ready
Error of the motion command in buffer region
Axis error during interpretation of commands
Axis error during implementation of the motion commands
Mono-axis exceeds the software limit
Arm gesture is inconsistent
Target position for P2P motion command is out of Robot’s
operating range
Target position of command for continuous path is out of
Robot’s operating range
Spatial movement exceeds the operating range of Robot
P2P movement path exceeds the operating range of Robot
Error in switching the coordinates
Error in switching user coordinates
Error in switching tool coordinates
Loss of internal communication packet
Error in check code for internal communication
The arc command is out of boundary
Time out error in transmission of vision parameters followed
by conveyor belt
The following speed for conveyor belt exceeds limits
Overtime error in transmission of vision parameters
followed by conveyor belt
The jogging speed of the TP hand wheel is too fast.
The TP hand wheel is jogging.
Note :
If there’s other alarm code appearing, please contact the technique team or agent directly for further support.
"?"represents the number of "1. ~ 2." in the alarm of group type.