Safety
Information
Introduction
Product
Information
System
configuration
Mechanical
Installation
Electrical
Installation
Getting
Started
Basic
parameters
Running
the motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
Data
Diagnostics
UL Listing
Information
186 Unidrive SPM User Guide
www.controltechniques.com Issue Number: 3
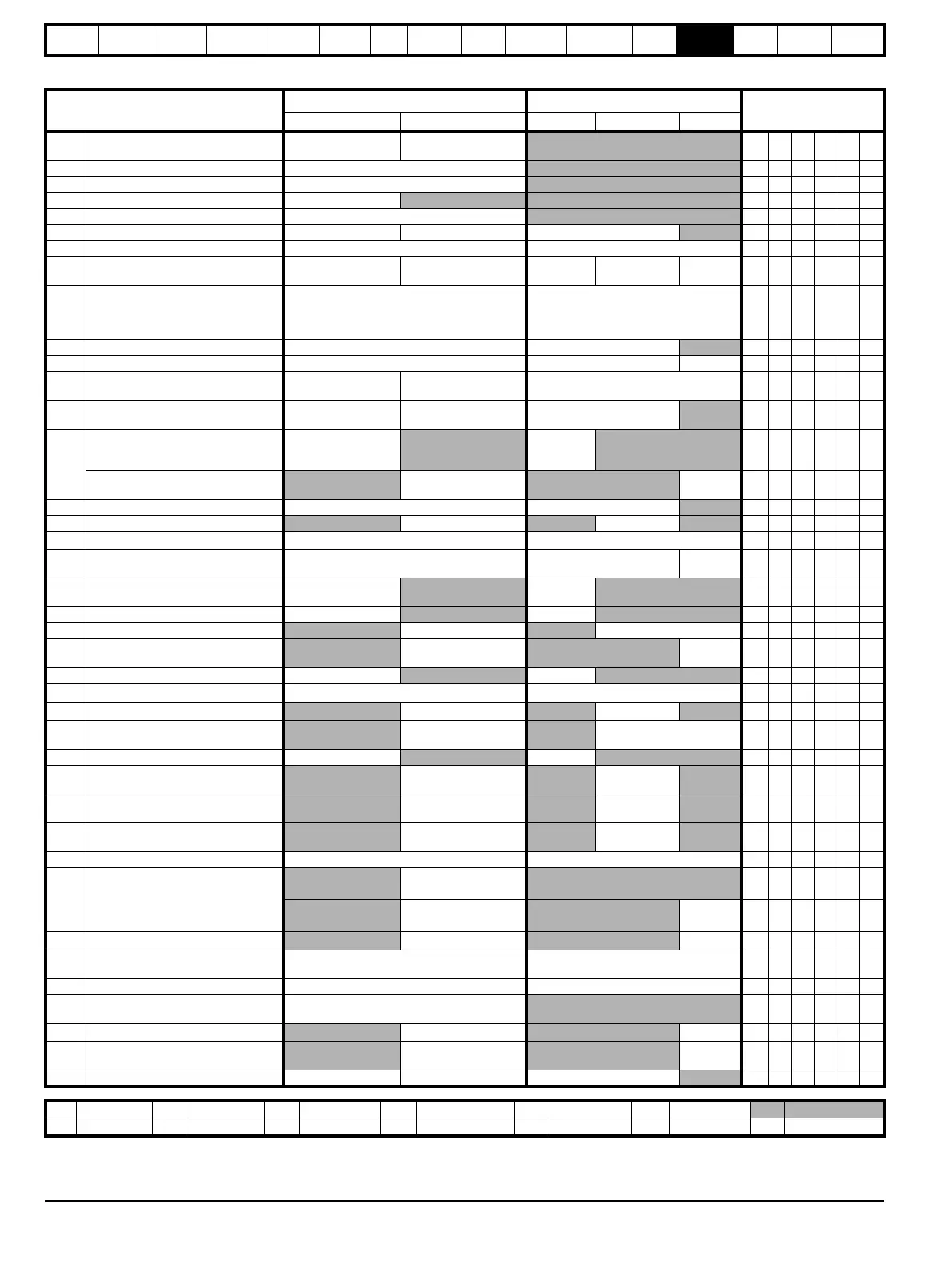
Parameter
Range(
Ú)Default(Ö)
Type
OL CL OL VT SV
5.01 Output frequency {0.11}
±SPEED_FREQ_
MAX Hz
±1,250.0 Hz
RO Bi FI NC PT
5.02 Output voltage 0 to AC_voltage_max V
RO Uni FI NC PT
5.03 Output power ±Power_max kW
RO Bi FI NC PT
5.04 Motor rpm {0.10} ±180,000 rpm
RO Bi FI NC PT
5.05 D.C bus voltage 0 to +DC_voltage_max V
RO Uni FI NC PT
5.06 Rated frequency {0.47} 0 to 3,000 Hz VT> 0 to 1,250.0 Hz EUR> 50.0, USA> 60.0
RW Uni US
5.07 Motor rated current {0.46} 0 to Rated_current_max A Drive rated current [11.32] RW Uni RA US
5.08 Rated load rpm / rated speed {0.45} 0 to 180,000 rpm 0.00 to 40,000.00 rpm
EUR> 1,500
USA> 1,800
EUR> 1,450.00
USA> 1,770.00
3,000.00 RW Uni US
5.09 Rated voltage {0.44} 0 to AC_VOLTAGE_SET_MAX V
200V drive: 230
400V drive: EUR> 400, USA> 460
575V drive: 575
690V drive: 690
RW Uni RA US
5.10 Rated power factor {0.43} OL & VT> 0.000 to 1.000 0.850
RW Uni RA US
5.11 Number of motor poles {0.42} Auto to 120 Pole (0 to 60) Auto (0) 6 POLE (3) RW Txt US
5.12 Autotune {0.40}0 to 2
VT> 0 to 4
SV> 0 to 6
0RWUniNC
5.13
Dynamic V/F / flux optimise
select
{0.09} OFF (0) or On (1) VT> OFF (0) or On (1) OFF (0)
RW Bit US
5.14
Voltage mode select {0.07}
Ur_S (0), Ur (1),
Fd (2), Ur_Auto (3),
Ur_I (4), SrE (5)
Ur_I (4) RW Txt US
Action on enable
SV> nonE (0),
Ph EnL (1), Ph Init (2)
nonE(0) RW Txt US
5.15 Low frequency voltage boost {0.08} 0.0 to 25.0 % of motor rated voltage 1.0
RW Uni US
5.16 Rated rpm autotune {0.33}
VT> 0 to 2 0 RW Uni US
5.17 Stator resistance
0.000 to 65.000
x 10 mΩ
0.0 RW Uni RA US
5.18
Maximum switching
frequency
{0.41} 3 (0), 4 (1), 6 (2) 3 (0) 6 (2) RW Txt RA US
5.19
High stability space vector
modulation
OFF (0) or On (1)
OFF (0) RW Bit US
5.20 Quasi-square enable OFF (0) or On (1)
OFF (0) RW Bit US
5.21 Field gain reduction
OFF (0) or On (1) OFF (0) RW Bit US
5.22
High speed servo mode
enable
SV> OFF (0) or On (1) 0RWBit US
5.23 Voltage offset 0.0 to 25.0 V
0.0 RW Uni RA US
5.24
Transient inductance (
σL
s
)
0.000 to 500.000 mH 0.000 RW Uni RA US
5.25
Stator inductance (L
s
)
VT> 0.00 to 5,000.00 mH
0.00 RW Uni RA US
5.26
High dynamic performance
enable
OFF (0) or On (1) OFF (0) RW Bit US
5.27 Enable slip compensation OFF (0) or On (1)
On (1) RW Bit US
5.28
Field weakening
compensation disable
VT> OFF (0) or On (1) OFF (0) RW Bit US
5.29 Motor saturation breakpoint 1
VT> 0 to 100% of rated
flux
50 RW Uni US
5.30 Motor saturation breakpoint 2
VT> 0 to 100% of rated
flux
75 RW Uni US
5.31 Voltage controller gain 0 to 30 1 RW Uni US
5.32
Motor torque per amp, K
t
VT> 0.00 to 500.00
N m A
-1
RO Uni US
SV> 0.00 to 500.00
N m A
-1
1.60 RW Uni US
5.33
Motor volts per 1,000 rpm, K
e
SV> 0 to 10,000 V 98 RW Uni US
5.35
Disable auto switching
frequency change
OFF (0) or On (1) OFF (0) RW Bit US
5.36 Motor pole pitch 0 to 655.35 mm 0.00 RW Uni US
5.37 Actual switching frequency
3 (0), 4 (1), 6 (2), 8 (3), 12 (4), 16 (5), 6 rEd (6),
12 rEd (7)
RO Txt NC PT
5.38 Minimal movement phasing test angle
SV> 0.0 to 25.5°
5.0 RW Uni US
5.39
Minimal movement phasing
test pulse length
SV> 0 to 3 0RWUni US
5.40 Spin start boost 0.0 to 10.0 VT> 0.0 to 10.0 1.0
RW Uni US
RW Read / Write RO Read only Uni Unipolar Bi Bi-polar Bit Bit parameter Txt Text string
FI Filtered DE Destination NC Not copied RA Rating dependent PT Protected US User save PS Power down save

 Loading...
Loading...








