.....
.....
.....
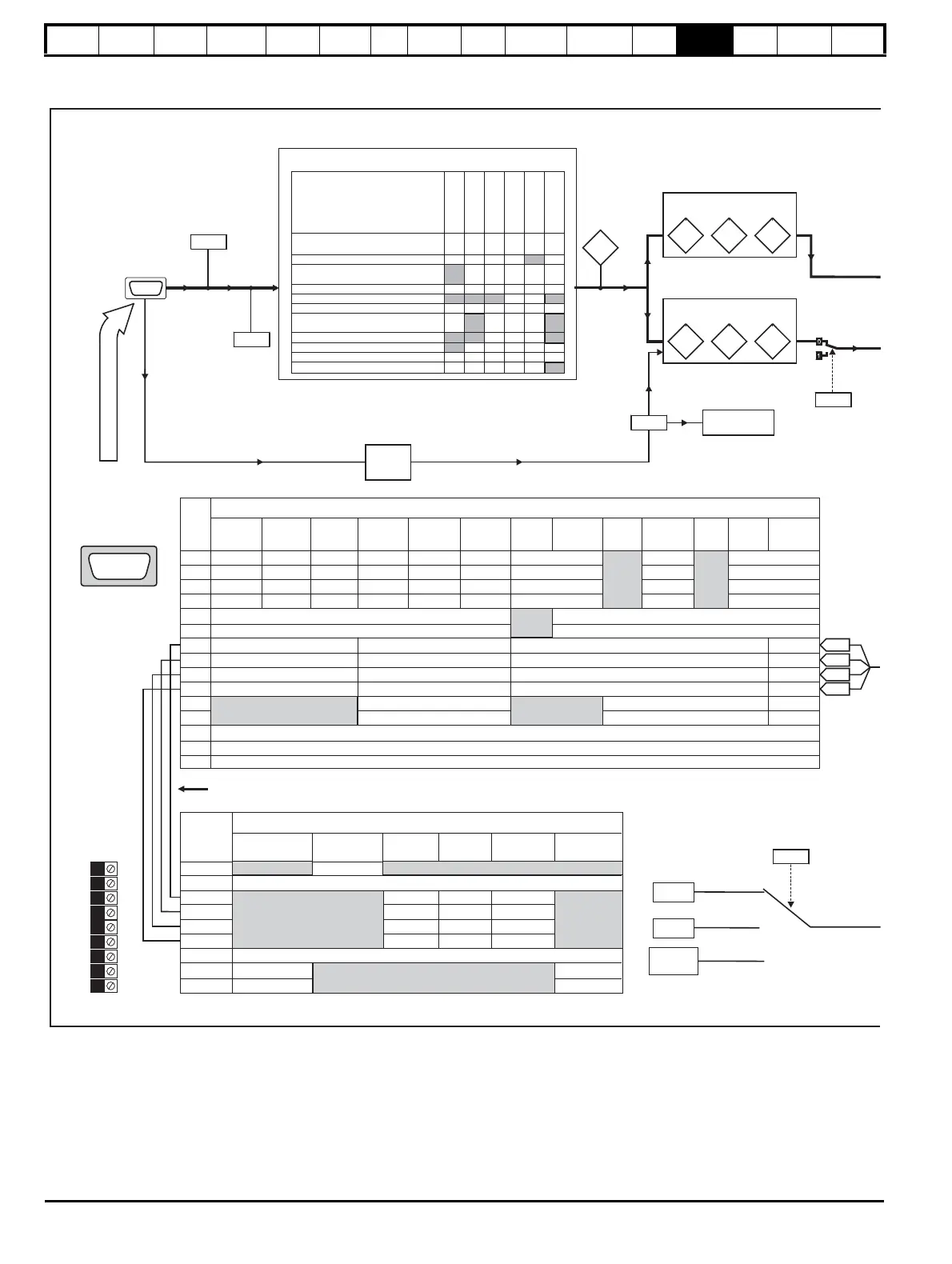
PL2
Solutions
Module
15-way
D-type
Solutions
Module
terminal
block
SK1
PL2 Term
1
2
3
4
5
6
7
8
9
Freeze RS485
input
Freeze +24V
input
Ab output Fd output SSI output Marker output
Freeze inputs / Encoder outputs
Freeze
0V common
A
A\
B
B\
F
F\
D
D\
Data
Data\
Clock\ (input)
Clock (input)
0V common
Freeze
Freeze\
Z
Z\
Hard wired connections inside the module
7
8
9
10
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
Ab Fd Fr
(0) (1) (2)
AFF
A\ F\ F\
BDR
B\ D\ R\
Ab.SErVO Fd.SErVO Fr.SErVO
(3) (4) (5)
AFF
A\ F\ F\
BDR
B\ D\ R\
U
U\
V
V\
W
W\
Z
Z\
SC SC.HIPEr EndAt SC.EndAt SSI SC.SSI SC.SErVO
(6) (7) (8) (9) (10) (11) (12)
Simulated encoder: Aout, Fout, Data SSI (output)
Simulated encoder: Aout\, Fout\, Data\ SSI (output)
Simulated encoder: Bout, Dout, SSI (input)
Simulated encoder: Bout\, Dout\, SSI (input)
Clock\
Clock
+V
0V common
th
Cos
Cosref
Sin
Sinref
Cos
Cosref
Sin
Sinref
Encoder input - Data (input/output)
Encoder input - Data\ (input/output)
Encoder input - Clock (output)
Encoder input - Clock\ (output)
Encoder
SK1
Term
Cos
Cosref
Sin
Sinref
Aout, Fout, Data SSI (output)
Aout\, Fout\, Data\ SSI (output)
Bout, Dout, SSI (input)
Bout\, Dout\, SSI (input)
Clock\
Clock
U
U\
V
V\
W
W\
x.16
Termination
disable
x.09
Encoder setup
Incremental
encoder
SC
encoder
SC.Hiper
encoder
SC EnDAt
SC SSI
Comms
encoder
XXXX
x.17
Error
detection
x.29 x.30 x.31
Position
Fine
position
Revolution
counter
Non marker position information
x.32 x.33 x.34
Position
Fine
position
Revolution
counter
Marker position information
x.45
Position
feedback
initialised
.....
.....
.....
x.08
Encoder type
Pr =0to12x.15
Marker
flag
Solutions
Module
15-way
D-type
Key:
- Information required from user
- Parameter can be set-up by the user or the drive automatically
# - Configuration dependant / User selectable
ü
X
SK1
x.07
Marker
position
disable
Encoder turns / Linear encoder
comms to sinewave ratio
Equivalent lines per rev
Single turn comms resolution /
Linear encoder comms bits
Encoder supply voltage
Encoder comms baud rate
Encoder type
Comms encoder mode /
Rotary select / Terminations
Auto-config / SSI format
Disable encoder position check
Position feedback initialised
Lines per revolution divider
Parameter
Marker
input
Reference / feedback encoder input
üüü
üü
üüü
ü
ü
##
ü
x.10
x.13
x.14
x.15
x.11
x.18
x.44
x.45
x.46
x.16
ü
ü
üüü
ü
ü
üü
üüü
ü
ü
üü
ü
ü
#
üüüü
#####
xx.SErVO
XX
ü
ü
ü
ü
ü
ü
RS485
24V
Drive /slot
bus input
x.38
Freeze input
mode selection

 Loading...
Loading...








