Emotron AB 01-4429-01r2 Functional Description 95
PID P Gain [383]
Setting the P gain for the PID controller.
Communication information
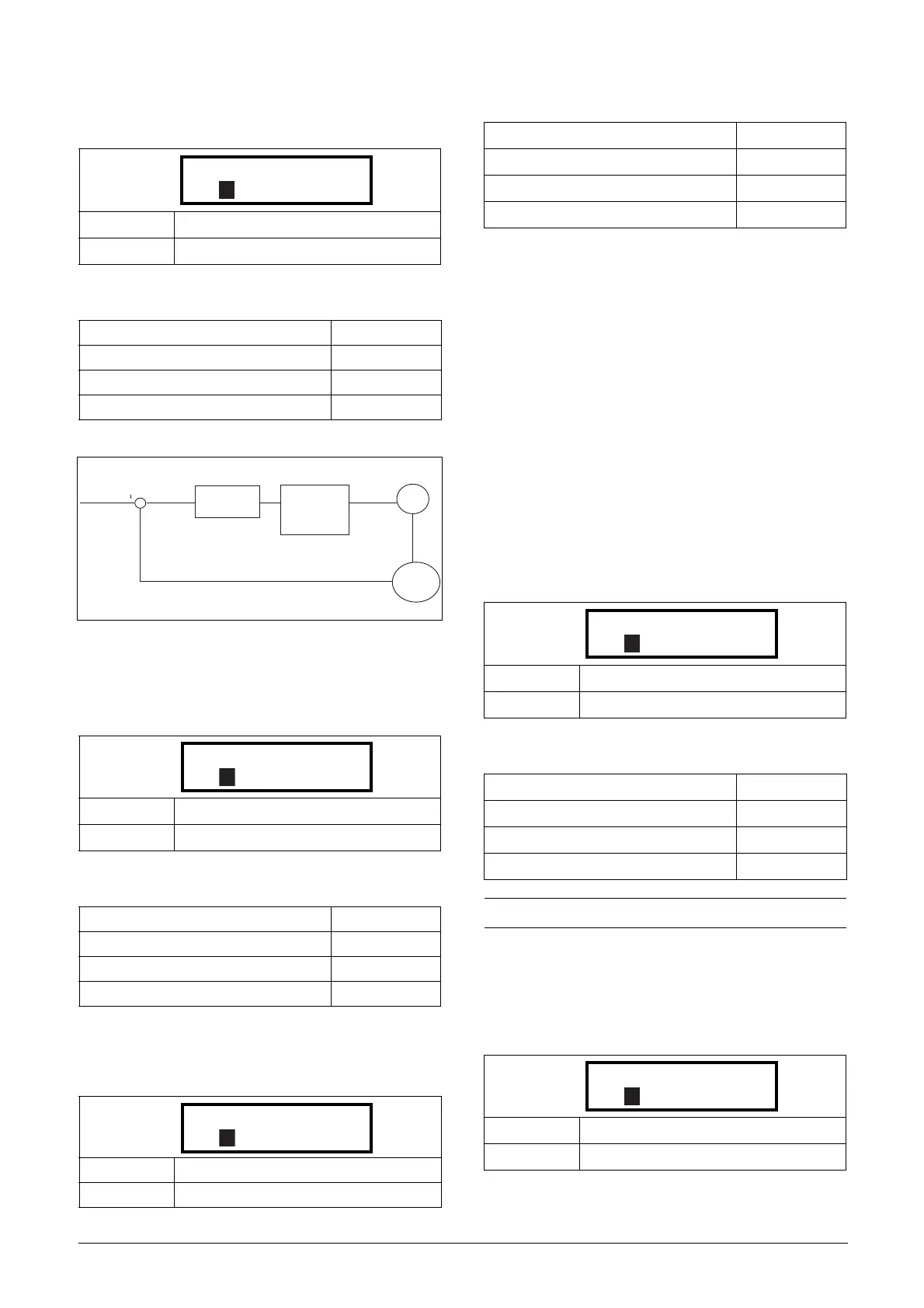
Fig. 75 Closed loop PID control
PID I Time [384]
Setting the integration time for the PID controller.
Communication information
Process PID D Time [385]
Setting the differentiation time for the PID controller.
Communication information
PID sleep functionality
This function is controlled via a wait delay and a separate
wake-up margin condition. With this function it is possible
to put the VSD in “sleep mode” when the process value is at
it’s set point and the motor is running at minimum speed for
the length of the time set in [386]. By going into sleep
mode, the by the application consumed energy is reduced to
a minimum. When the process feedback value goes below
the set margin on the process reference as set in [387], the
VSD will wake up automatically and normal PID operation
continues, see examples.
PID sleep when less than minimum
speed [386]
If the PID output is equal to or less than minimum speed
for given delay time, the VSD will go to sleep.
Communication information
PID Activation Margin [387]
The PID activation (wake-up) margin is related to the proc-
ess reference and sets the limit when the VSD should wake-
up/start again.
Default: 1.0
Range: 0.0–30.0
Modbus Instance no/DeviceNet no: 43156
Profibus slot/index 169/60
Fieldbus format Long, 1=0.1
Modbus format EInt
Default: 1.00 s
Range: 0.01–300 s
Modbus Instance no/DeviceNet no: 43157
Profibus slot/index 169/61
Fieldbus format Long, 1=0.01 s
Modbus format EInt
Default: 0.00 s
Range: 0.00–30 s
Process
reference
Process
feedback
Process
PID
VSD
Process
Modbus Instance no/DeviceNet no: 43158
Profibus slot/index 169/62
Fieldbus format Long, 1=0.01 s
Modbus format EInt
Default: Off
Range: Off, 0.01 –3600 s
Modbus Instance no/DeviceNet no: 43371
Profibus slot/index 170/20
Fieldbus format Long, 1=0.01 s
Modbus format EInt
NOTE: Menu [386] has higher priority than menu [342].
Default: 0
Range: 0 –10000 in Process unit

 Loading...
Loading...


