96 Functional Description Emotron AB 01-4429-01r2
Communication information
Example 1 PID control = normal (flow or pres-
sure control)
[321] = F (AnIn)
[322] = Bar
[310] = 20 Bar
[342] = 2 s (inactive since [386] is activated and have higher
priority)
[381]= On
[386] = 10 s
[387] = 1 Bar
The VSD will stop/sleep when the speed (PID output) is
below or equal to Min Speed for 10 seconds. The VSD will
activate/wake up when the “Process value” goes below the
PID Activation Margin which is related to the process refer-
ence, i.e. goes below (20-1) Bar. See Fig. 76.
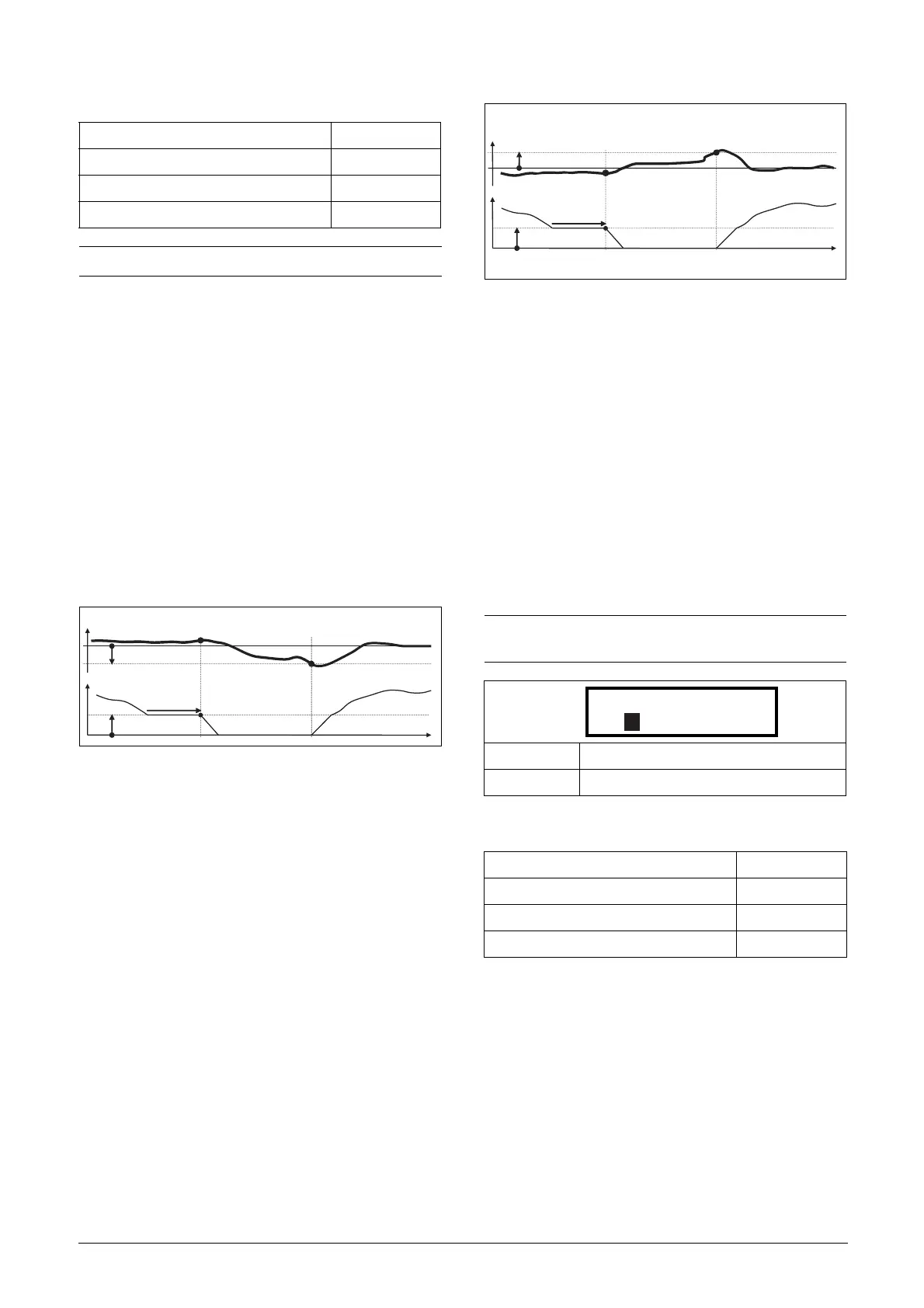
Fig. 76 PID Stop/sleep with normal PID
Example 2 PID control = inverted (tank level
control)
[321] = F (AnIn)
[322] = m
[310] = 7 m
[342] = 2 s (inactive since [386] is activated and have higher
priority)
[381]= Inverted
[386] = 30 s
[387] = 1 m
The VSD will stop/sleep when the speed (PID output) is
below or equal to Min Speed for 30 seconds. The VSD will
activate/wake up when the “Process value” goes above the
PID Activation Margin which is related to the process refer-
ence, i.e. goes above (7+1) m. See Fig. 77.
Fig. 77 PID Stop/sleep with inverted PID
PID Steady State Test [388]
In application situations where the feedback can become
independent of the motor speed, this PID Steady Test func-
tion can be used to overrule the PID operation and force the
VSD to go in sleep mode i.e. the VSD automatically reduces
the output speed while at the same time ensures the process
value.
Example: pressure controlled pump systems with low/no
flow operation and where the process pressure has become
independent of the pump speed, e.g. due to slowly closed
valves. By going into Sleep mode, heating of the pump and
motor will be avoided and no energy is spilled.
PID Steady state test delay.
Communication information
PID Steady State Margin [389]
PID steady state margin defines a margin band around the
reference that defines “steady state operation”. During the
steady state test the PID operation is overruled and the VSD
is decreasing the speed as long as the PID error is within the
steady state margin. If the PID error goes outside the steady
Modbus Instance no/DeviceNet no: 43372
Profibus slot/index 170/21
Fieldbus format Long
Modbus format EInt
NOTE: The margin is always a positive value.
[711] Process Value
[387]
[712] Speed
[341] Min Speed
[386]
Stop/Sleep
[310] Process Ref
Activate/Wake up
NOTE: It is important that the system has reached a
stable situation before the Steady State Test is initiated.
Default: Off
Range: Off, 0.01–3600 s
Modbus Instance no/DeviceNet no: 43373
Profibus slot/index 170/22
Fieldbus format Long, 1=0.01 s
Modbus format EInt
[711] Process Value
[387]
[712] Speed
[341] Min Speed
[386]
Stop/Sleep
[310] Process Ref
Activate/Wake up

 Loading...
Loading...


