Ethos v1.5.7 and X18, X20 series User Manual
Throttle hold
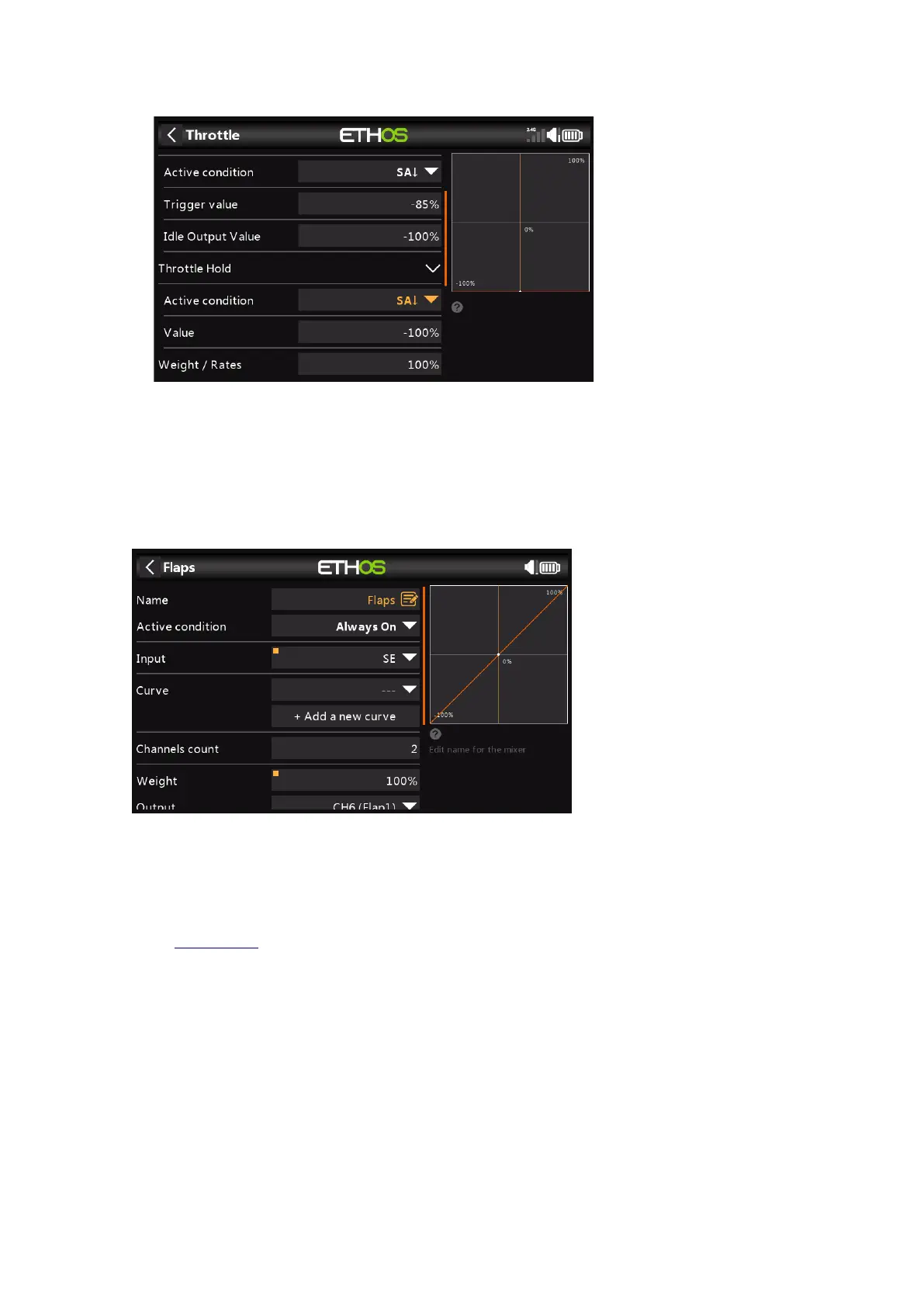
‘Throttle hold’ is used to cut the motor in an emergency from any throttle position.
When the throttle hold active condition is met, the throttle output is instantly reduced
to -100% (or the value entered). As can be seen in the graph above, the throttle
output has been cut to -100% even though the throttle stick is above the half way
mark.)
Flaps
In this example we assign the flaps to switch SE, and increase both output channel
weights to 100%.
Step 5. Bind the receiver
Use the RF System function to register (if your receiver is ACCESS) and bind your receiver
in preparation for configuring the Outputs.
Please read through the next section on configuring the Outputs before proceeding. To avoid
damage by inadvertently over-driving your servos, it would be wise to disconnect your servo
linkages or reduce the servo travel until you are ready to configure the servo min/max
limits.
Step 6. Configure the outputs
The Outputs section is the interface between the setup "logic" and the real world with
servos, linkages and control surfaces, and motors or engines. So far we have set up the
logic for what we want each control to do. Now, we can adapt that to the mechanical
characteristics of the model. The various channels are outputs, for example CH1
corresponds to servo plug #1 on your receiver.
 Loading...
Loading...