207
Parameters of PID and PID2
Function Block Parameters
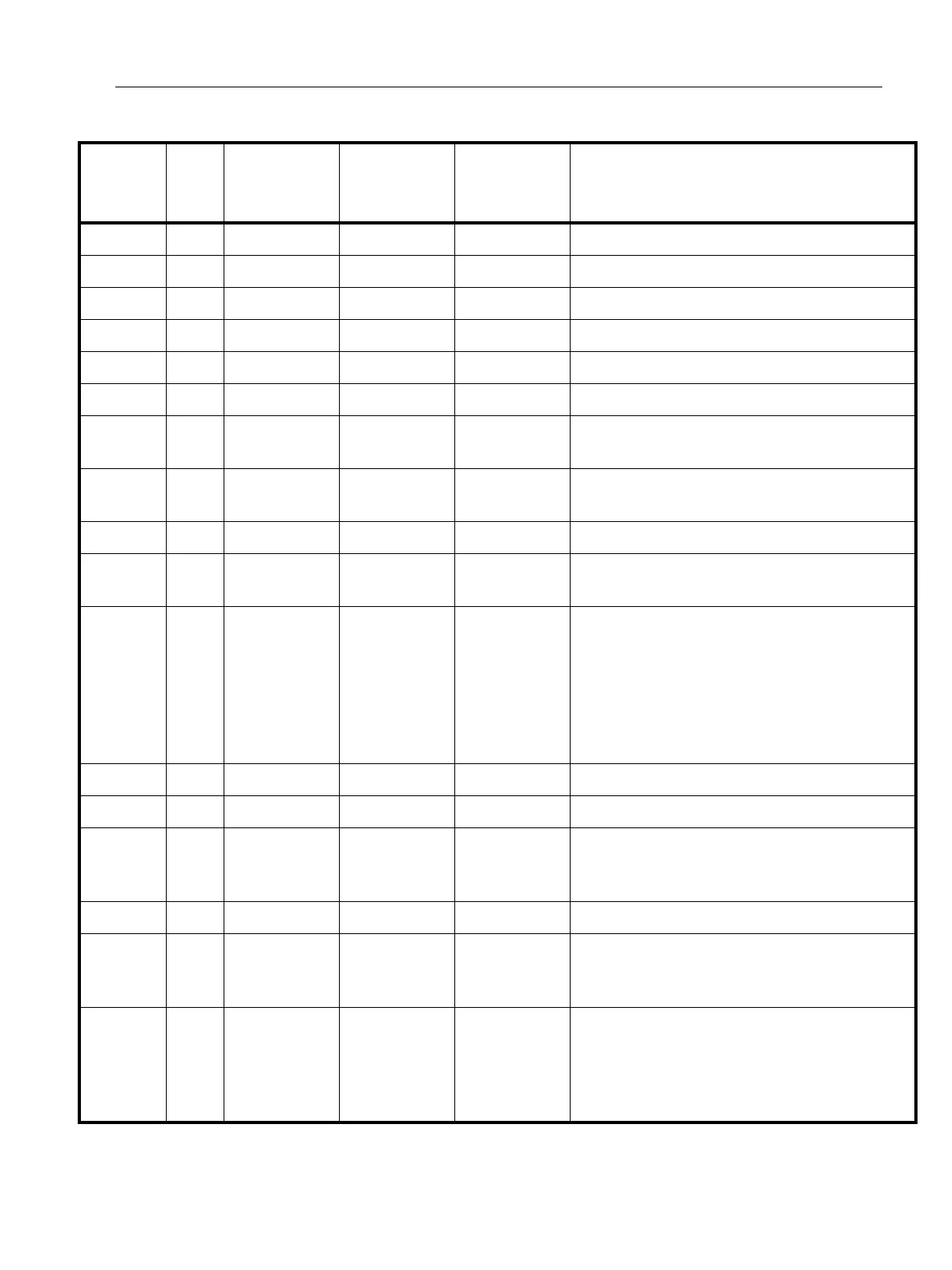
24 8024 RESET 10 — Integration time (seconds).
25 8025 BAL_TIME 0 Unused.
26 8026 RATE 0 Derivative time (seconds)
27 8027 BKCAL_IN 0 Readback of control output
28 8028 OUT_HI_LIM 100 Upper limit for control output (OUT)
29 8029 OUT_LO_LIM 0 Lower limit for control output (OUT)
30 8030 BKCAL_HYS 0 Hysteresis for release from a limit for
OUT.status.
31 8031 BKCAL_OUT — – Read-back value to be sent to the BKCAL_IN
of the downstream block.
32 8032 RCAS_IN 0 Remote setpoint set from the host computer.
33 8033 ROUT_IN — Remote control output value set from a
computer, etc.
34 8034 SHED_OPT 1 Defines the mode shedding actions, namely,
the changes to be made to MODE.BLK.target
and MODE.BLK.actual when (1) the value of
RCAS_IN.status becomes Bad if
MODE_BLK.actual = RCAS, or when (2) the
value of ROUT_IN.status becomes Bad if
MODE_BLK.actual = ROUT.
35 8035 RCAS_OUT — – Remote setpoint sent to a host computer, etc.
36 8036 ROUT_OUT — – Remote control output value.
37 8037 TRK_SCALE 0-100% Man Upper and lower scale limits used to convert
the output tracking value (TRK_VAL) to
non-dimensional.
38 8038 TRK_IN_D Switch for output tracking.
39 8039 TRK_VAL Output tracking value. When
MODE_BLK.actual = LO, the value scaled from
the TRK_VAL value is set in OUT.
40 8040 FF_VAL Feed-forward input value. The FF_VAL value is
scaled to a value with the same scale as for
OUT, multiplied by the FF_GAIN value, and
then added to the output of the PID
computation.
Table 65 PID Block Parameters (Continued)
Relative
Index
Index Parameter
Name
Default
(factory
setting)
Write Description