57 / 80
33028_mc_28_Teil2_jh
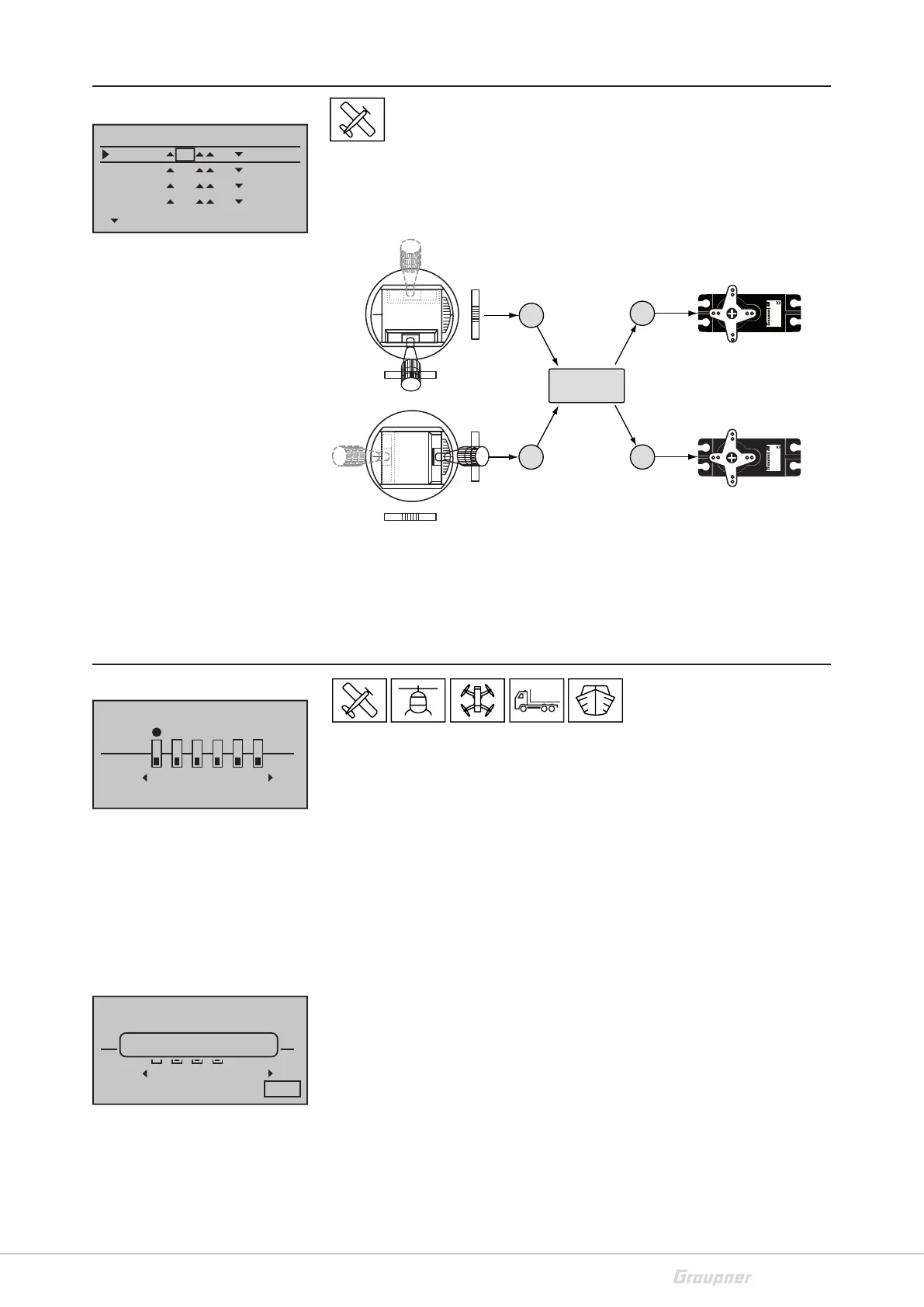
Dual mixer
In this menu, you can link two control functions with four freely pro-
grammable dual mixers.
Example (V-tail mixer):
In the case of a dual mixer, the control signals are output from the
two controls to both outputs of the mixers.
In the right column, you can set the differentiation value between
the two outputs.
Fail Safe
In this menu you can set the positions of all the servos, which are
approached in the event of a fault in the radio connection. This also
applies to the period when the receiver is switched on until the radio
connection to the transmitter is reached.
You have the following possibilities (switch the receiver on:
"Hold" - In the event of a missing radio connection, the servo is held
at the last position before the radio connection failed. When the
radio connection is restored, the servo reacts normally again.
"Pos." - In the event of a missing radio connection, the servo is moved
to a certain position after the set delay time.
Position setting:
• Set the "Pos." Function of the desired channel
• Delay setting
• Move the servo in the desired position
• Select STO, tap the SET button
• The position is confirmed by "Position stored"
Ty p
Diff.
zu
Dual mixer
Mixer1
Mixer2
??
??
Mixer3
Mixer4
??
??
??
??
??
??
0%
0%
0%
0%
3
3
4
Servo
4,8 V
C 577
Best.-Nr. 4101
Servo
4,8 V
C 577
Best.-Nr. 4101
4
V-Tail
mixer
Control functions
inputs
Control channels
(receiver
outputs)
Elevator control stick
Rudder control stick
Rudder / Elevator right
Rudder / Elevator left
Rudder
Elevator
Elevator
Rudder
Seite
Elevator
Fail-safe adjust
Pos.
hold
1 2 3
4
5
6
DELAY: 0.25s STO
Fail-safe adjust
Pos.
hold
13 14 15
16
DELAY: 0.25s STO
Position stored