EXCEL CARE CONTROL ICONS ALPHABETIC REFERENCE
197 74-5577–33 (US)
EN2B-0184 GE51 R0518 (Europe)
PID Operation
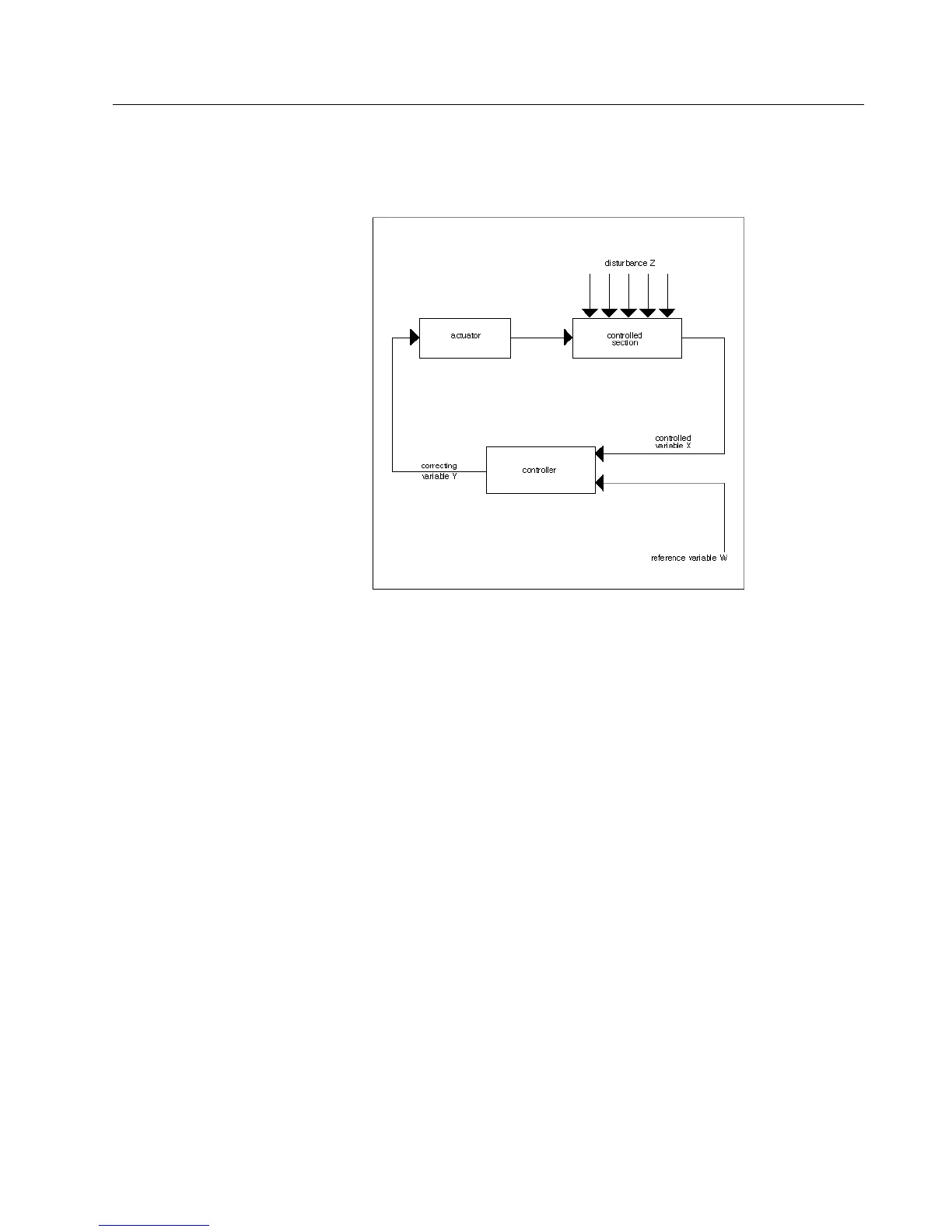
Closed Control Loops A PID is generally part of a closed control loop. Control is possible only in a closed
control loop because the controller requires feedback from the controlled section
with respect to changes in the positioning signal. The following diagram illustrates
closed control loop operation:
“Disturbance” is the changeable quantity that influences the controller, for example,
an outdoor air temperature.
“Controlled section” refers to the part of the system where the controlled variable
should be kept constant (for example, a heating circuit).
“Actuator” is the device in the system that the positioning signal repositions to
maintain the setpoint. An example of such a device is a mixing damper.
Continuous Controllers The PID in CARE applies to continuous controllers only. Continuous controllers can
assume any desired intermediate value between a minimum (yMIN) and a maximum
(yMAX) for its positioning signal.
Reverse vs Direct Acting Controllers can also be classified as direct-acting and reverse-acting.
The output of a direct-acting controller goes lower as the sensed value becomes
smaller.
The output of a reverse-acting controller goes higher when the sensed value goes
smaller.
The CARE PID operator is reverse-acting.

 Loading...
Loading...