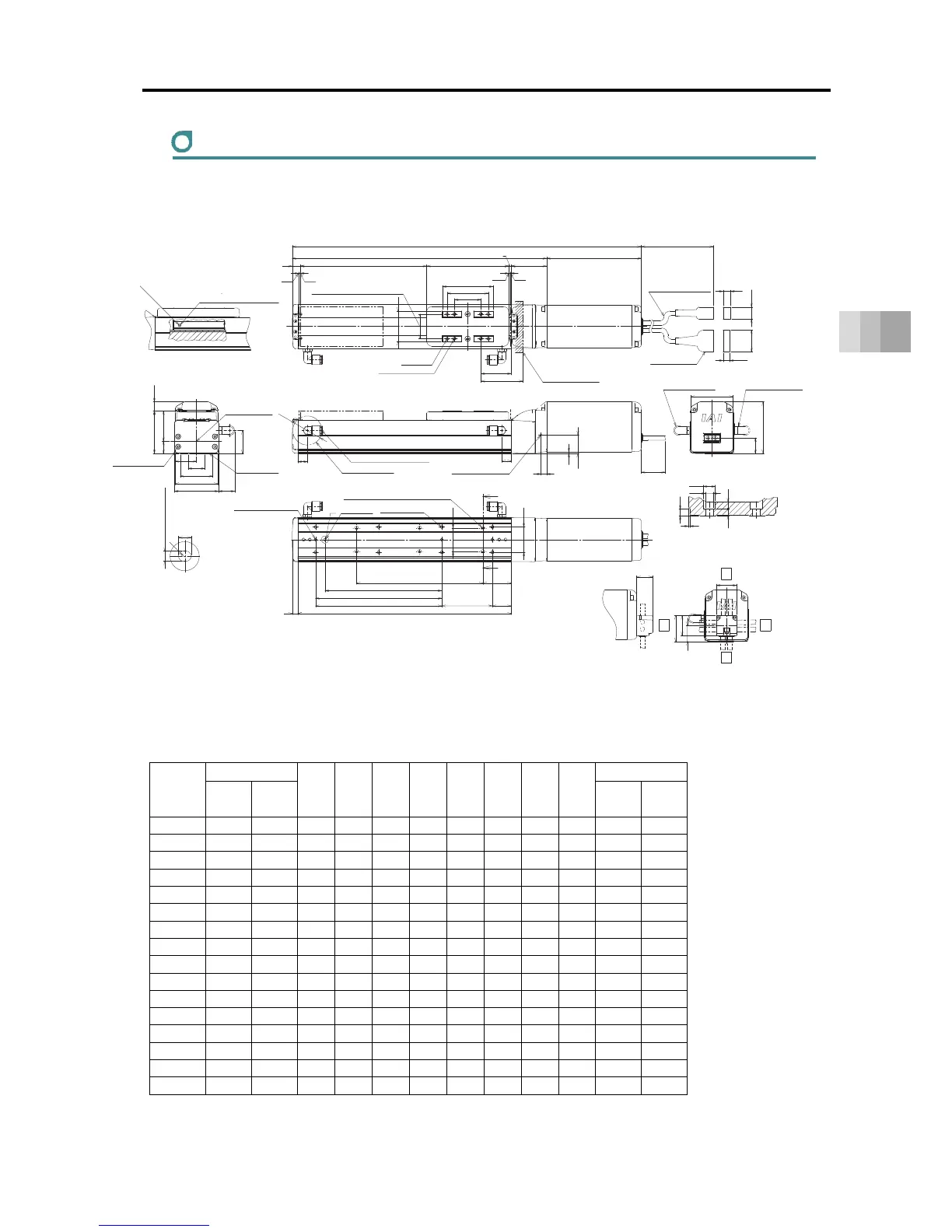
5.1 External Dimensions
5-14
5. External Dimensions
RCS4CR-SA7C
ST: Stroke, M.E.: Mechanical End, S.E.: Stroke End
■ Dimensions and Mass by Stroke
Unit: mm
Stroke
L
A B D E G H J K
Mass [kg]
W/o
Brake
With
Brake
W/o
Brake
With
Brake
50 403 438 253 188 0 4 1 4 0 0 3.5 4.0
100 453 488 303 238 1 6 1 4 85 0 3.8 4.3
150 503 538 353 288 1 6 2 6 85 100 4.0 4.5
200 553 588 403 338 2 8 2 6 185 200 4.3 4.8
250 603 638 453 388 2 8 3 8 185 200 4.5 5.0
300 653 688 503 438 3 10 3 8 285 300 4.7 5.2
350 703 738 553 488 3 10 4 10 285 300 5.0 5.5
400 753 788 603 538 4 12 4 10 385 400 5.2 5.7
450 803 838 653 588 4 12 5 12 385 400 5.4 5.9
500 853 888 703 638 5 14 5 12 485 500 5.7 6.2
550 903 938 753 688 5 14 6 14 485 500 5.9 6.4
600 953 988 803 738 6 16 6 14 585 600 6.1 5.6
650 1003 1038 853 788 6 16 7 16 585 600 6.4 6.9
700 1053 1088 903 838 7 18 7 16 685 700 6.6 7.1
750 1103 1138 953 888 7 18 8 18 685 700 6.8 7.3
800 1153 1188 1003 938 8 20 8 18 785 800 7.1 7.6
(
φ
46)
19.5
48
(66.5)
ST13
3 3
(12)
(19.5)
(34.5)
(10.5)
(300)
32
41
25
32
Section Z-Z
Detail of Counterbore for Base Attachment
25
(R)
5
Joint Attached Position
Standard Side
Joint Attached Position
Opposite Side (Option)
(25)
67
82
Rotation Area of Joint
Outer Diameter of Applied Tube:φ8
3
29.5
15
9
15
* No pipe joint for slider roller type (SR)
(25.5)
26.5
51.5
68
(14.5)
70
67.5
36.5
34
↓
V
S.E.M.E.
M.E.
Actuator Cable
Allowable Bending Radius R50
80
42
L
48
A
130
48
65
4
56
P
3080
45
40
9 B
37
Z
Z
Nipple Diameter
φ3.5
Grease oil supply port
Arrow view V
Ball screw For guides
Grease Nipple (the other side the same)
±0.02
Home
39 (Tolerance ±0.02 between the reamed hole)
4-φ5H7 Reamed Depth 10
4-M5 Depth 10
Be cautious for interference.
Slider Installed Load
185 (With Brake)
150 (W/o Brake)
Cable joint Connector
Allowable Moment
Reference position for Offset
Upper Surface of Slider
Reference surface
(Range of Dimension B)
Base seating surface
M3 Depth 6
(For ground connection,
the other side the same)
Maintain it
more than 100
4
+
0.012
0
From Base seating surface Depth 6
Detailed View P
Details Base oblong hole
3-φ4H7 Reamed Depth 6
(From Base seating surface)
(Number of the reamer holes 2
at the time of 50 and 100st)
Oblong hole
(Not for Strokes 50)
Through H-φ6, Depth φ9.5, Counter Boring Depth 5.5
(From back side)
Through E-M5
(Screwing Depth 10)
G×100P
K (φ4 hole - φ4 hole)
D×100P
J (φ4 hole - oblong hole)
φ9.5
φ6
5.3
5.5
5.5
(1)
CJR
CJL
CJB
CJT
Right
Left
Top
Bottom
Cable Exit Direction (Optional)
 Loading...
Loading...






