Pluto Inputs and outputs are not isolated.
The ground of the Pluto and the ground of the devices connected to I/Os must be the same.
Otherwise inputs or outputs may be damaged.
Torque off input
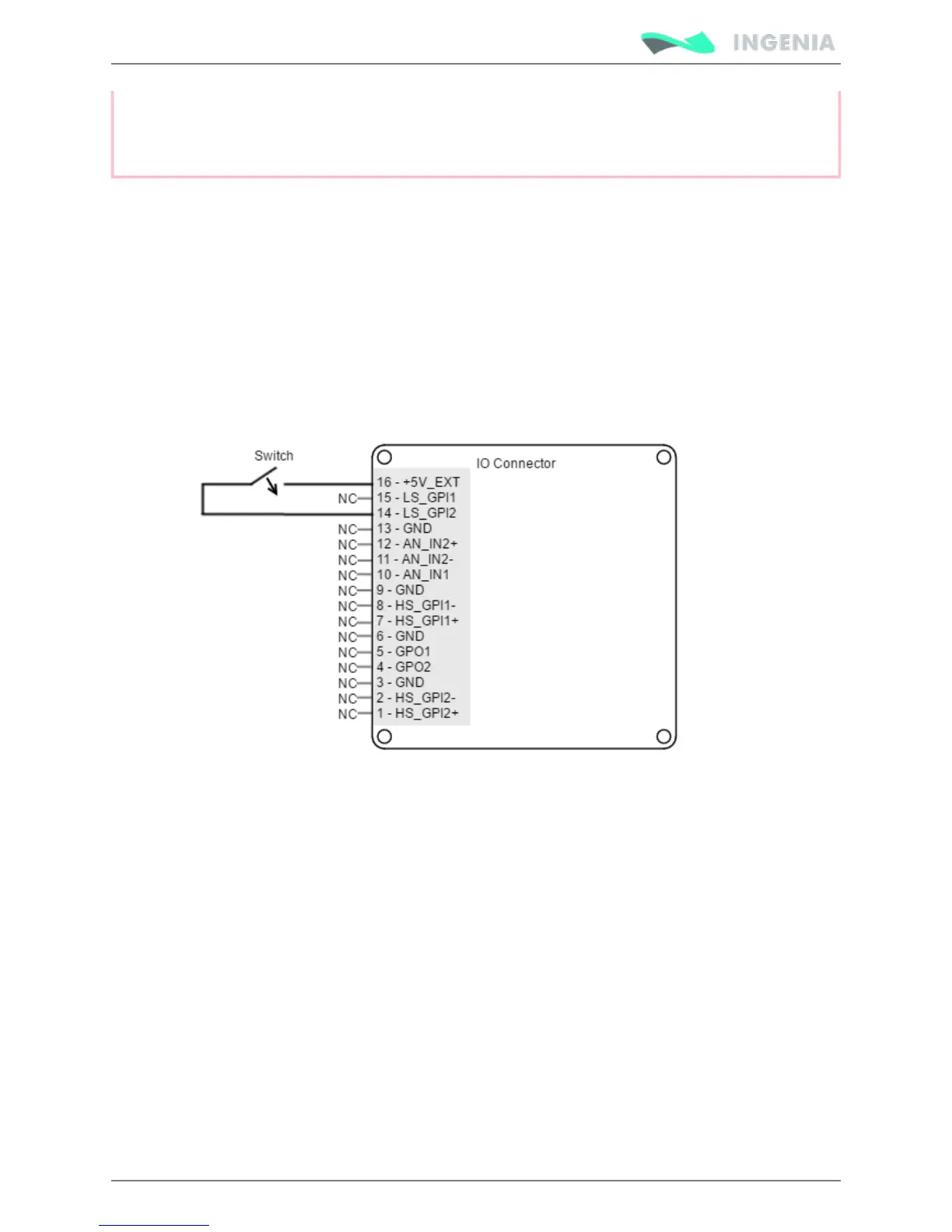
As assembly option (custom), the Pluto Servo Drive has a torque off input used to prevent motor torque
in an emergency event while the Pluto remains connected to the power supply. The is used for LS_GPI2
this purpose. When the torque off input is activated, the power stage is disabled automatically, and the
motor shaft will slow down until it stops under its own inertia and frictional forces. The power stage will
remain activated while the LS_GPI2 has a logic high state (4 V < V < 24 V), and will be disabled with a logic
in
low state (0 V < V < 1 V). The LS_GPI2 input has a logic low state by defect, so the switch must be
in
connected to a logic high level to activate the power stage. Next figures show an example to connect the
torque off input in two different ways. The self supplied option and the external supplied option: