Feedback connections
The motor has inputs for differential or single-ended digital and analog incremental feedbacks connector
encoders, for digital or analog Hall-effect devices. Pluto Servo Drive also provides a 5 V @ 200 mA output
for feedbacks supply. This output is overload and short circuit protected. Additional feedback connections
can be found on for PWM and Analog input feedback.I/O connector
Digital encoder interface
Pluto can use single ended or differential encoder inputs for velocity and/or position control, as well as
commutation sensor. The encoder provides incremental position feedback that can be extrapolated into
precise velocity or position information. Using high resolution encoders allows Pluto Servo Drive to use
sinusoidal commutation.
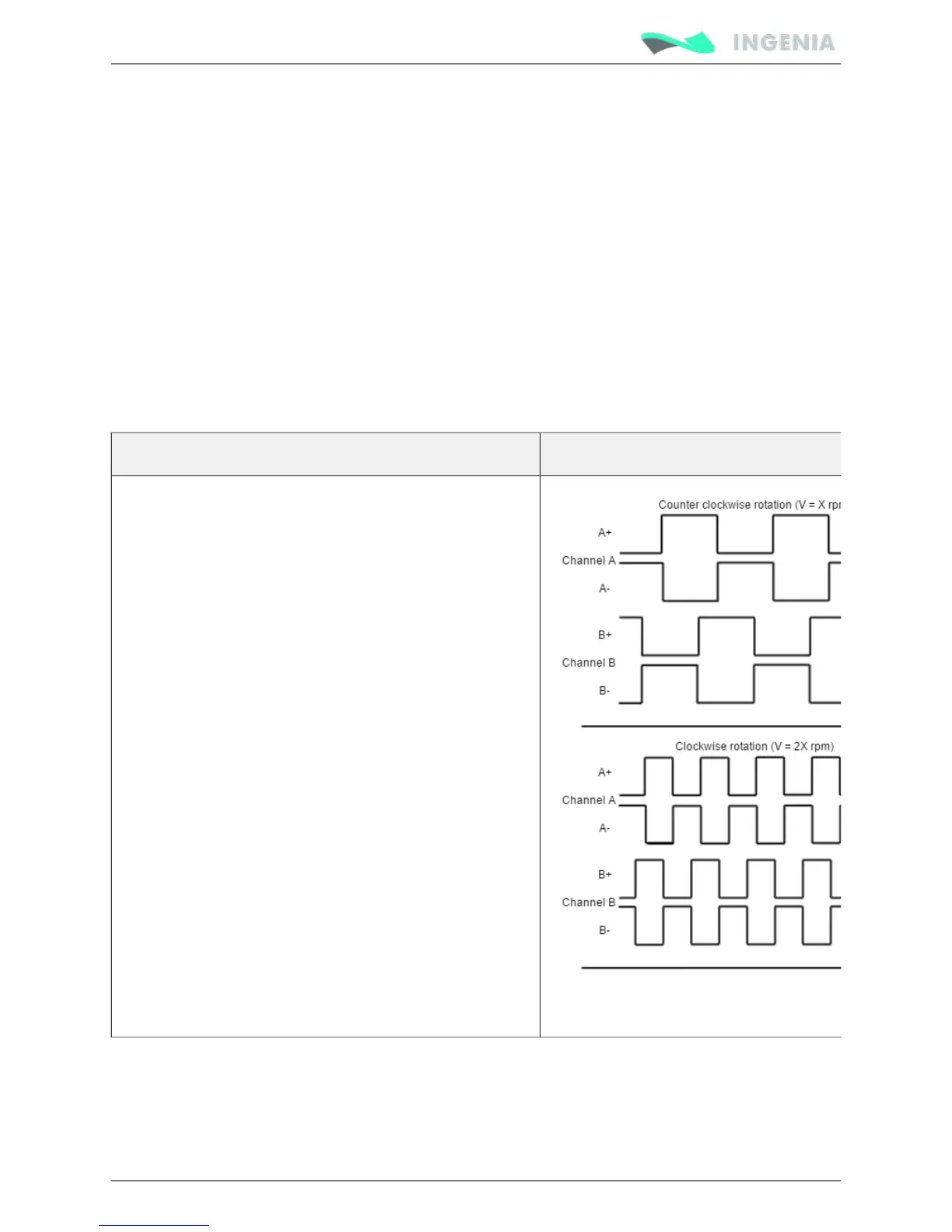
Channel A and channel B signals should have a phase shift of 90 degrees. Based on the speed and the
order of the pulse, the drive can calculate the motor velocity and position. Index signal (Z) is used to detect
absolute rotor position.
Example of single ended digital encoder inputs Example of digital differential encoder signals