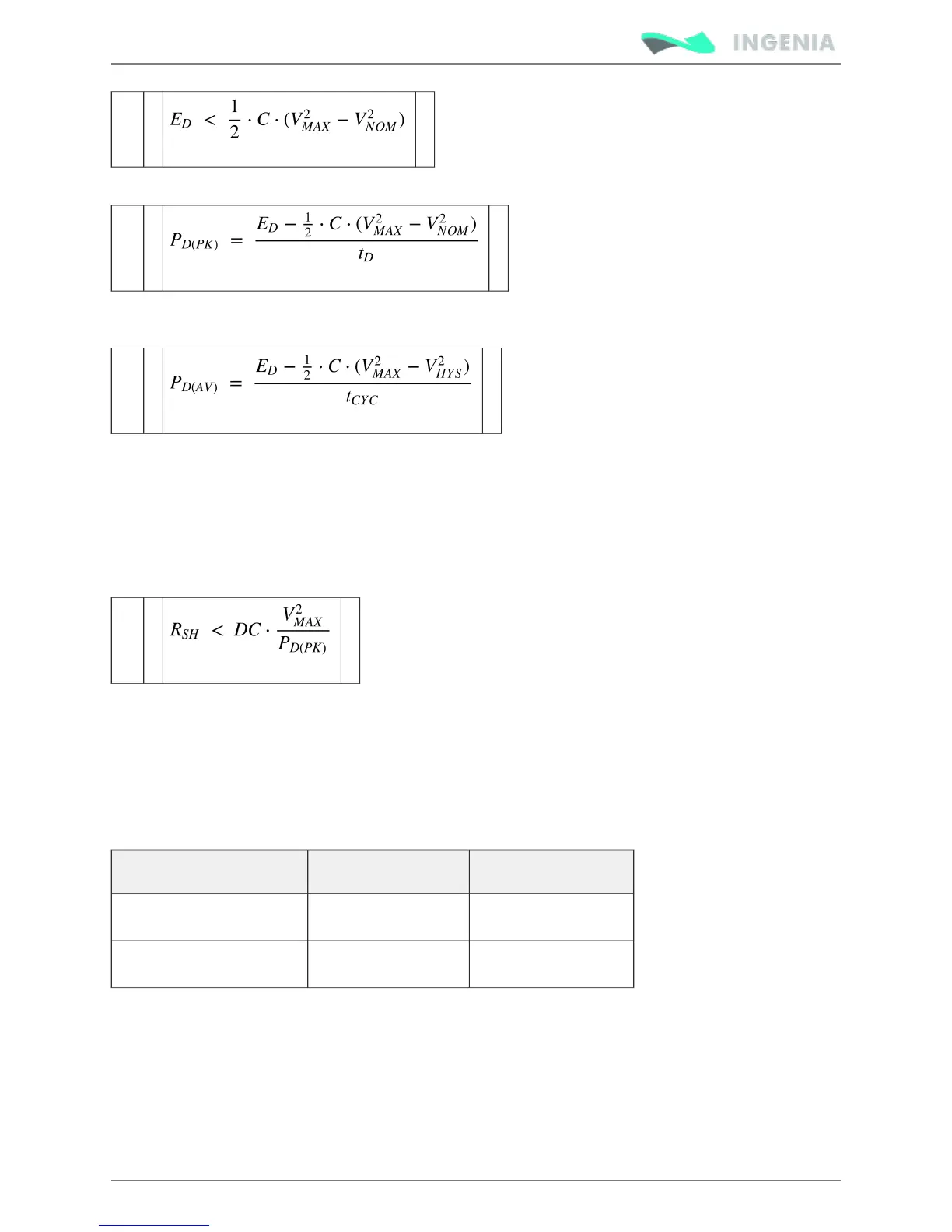
If a shunt resistor is necessary, the deceleration peak power P should be calculated using eqn. 5.
D(PK)
(5)
In systems with cyclic decelerations, the average deceleration power P should be determined using
D(PK)
eqn. 6.
(6)
The shunt resistor rated power (P ) must be higher than P . Deceleration peak power P must be
R D(AV) D(AV)
lower than the shunt resistor peak power during the deceleration time (t ). Typically, resistor
D
manufacturers provide graphs of resistor power depending on peak duration.
The maximum resistance value depends on the peak deceleration power and PWM duty cycle (DC). The
user may choose a combination of DC and R . It is recommended to have a duty cycle close to 50% since
SH
it will allow maximum braking flexibility. In case of doubt between two shunt resistor values it is suggested
to choose the lowest resistance value since the DC can be easily adjusted.
(7)
Motor wiring recommendations
Wire section
The minimum wire section is determined by the motor current. It is preferred to use wide section
stranded wires to reduce impedance, power losses and ease the assembly. Insulator size should not
exceed 5 mm (connector pitch). Following table indicates recommended section:
Connection Minimum wire size Maximum wire size
Stranded wire (preferred)
0.5 mm
2
1.5 mm
2
Solid wire
0.5 mm
2
1.5 mm
2
Wire length
The distance between the Pluto Servo Drive and the motor . Short should be minimized when possible
cables are preferred since they reduce power losses as well as electromagnetic emissions and immunity.
Avoid running motor wires in parallel with other wires for long distances, especially feedback and signal
wires.