The current ratings specified in figure are divided by 2 using this configuration since phase C
shares the current of two phases.
Hydra Servo Drive
Although Pluto can control two phase bipolar steppers, it is not specially designed for that
purpose. See for extremely high performance. Hydra Servo Drive
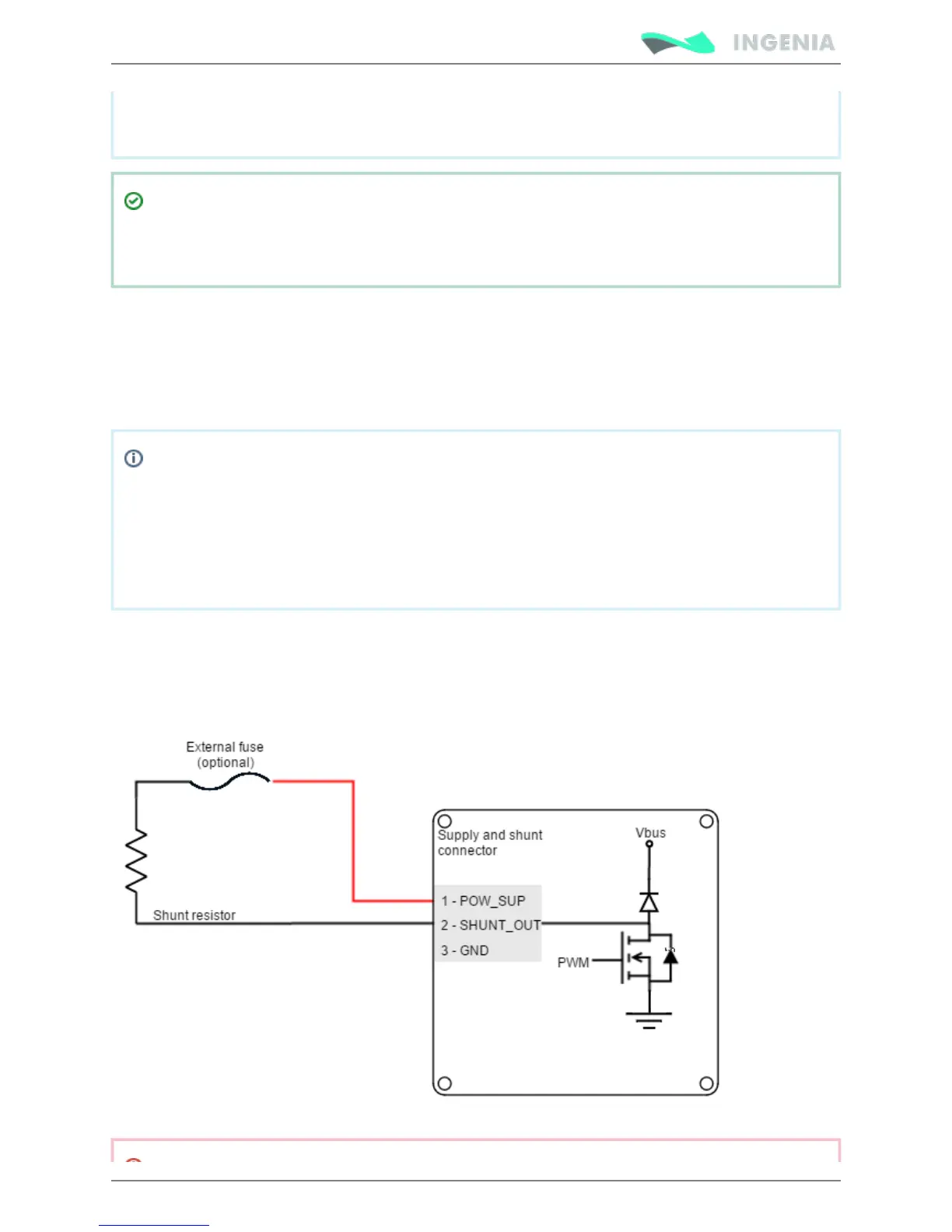
External shunt resistor
While decelerating a motor (abrupt motion brakes or reversals), the mechanical energy is converted into
electrical energy by the motor. This energy is regenerated into the power supply and could lead to an
increase of the supply voltage. To absorb this energy the Pluto incorporates a shunt transistor to connect
an external braking resistor.
Configuration of the shunt
The shunt transistor can be configured using parameters in the register 0x2103 - Shunt
.configuration
To set the shunt activation voltage use the registers in . Set above the 0x2101 - Drive bus voltage
maximum expected DC supply voltage + 5%. When using batteries set the voltage > maximum
charge voltage, this will allow regenerative braking and protect the battery against overcharging.
The external shunt resistor should be connected between SHUNT_OUT and SUPPLY pins of the Pluto
.Supply and shunt connector
It´s strongly recommended to use an external fuse to limit the maximum power dissipation according to
the chosen shunt resistor.
Shunt resistor connections should also be as short as possible to reduce parasitic inductances.