Appendix C
-
155
-
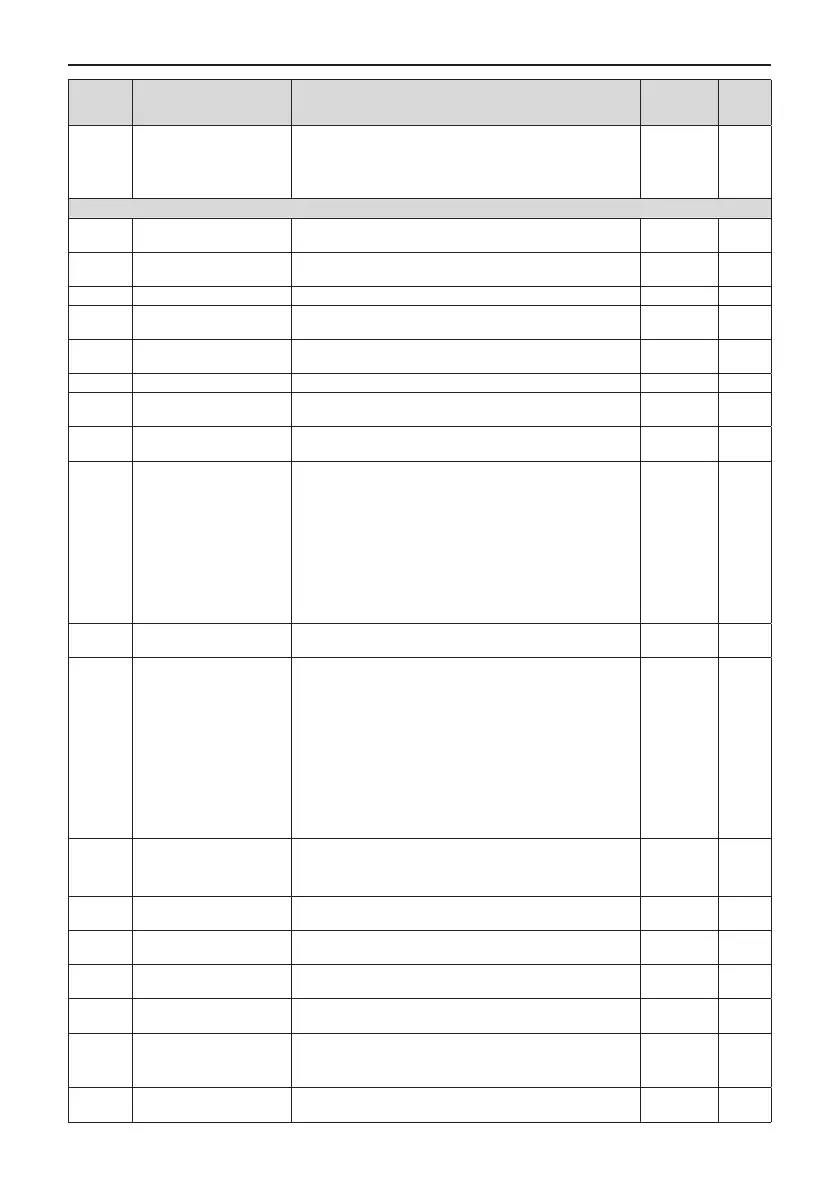
Function
Code
Name Setting Range Default Change
F1-37 Auto-tuning selection
0: No auto-tuning
1: Asynchronous motor partial static auto-tuning
2: Asynchronous motor dynamic auto-tuning
3: Asynchronous motor complete static auto-tuning
0
★
Group F2: Vector Control Parameters of Motor 1
F2-00
Speed loop proportional
gain 1
1 to 100 30
☆
F2-01
Speed loop integral time
1
0.01s to 10.00s 0.50s
☆
F2-02 Switchover frequency 1 0.00 to F2-05 5.00 Hz
☆
F2-03
Speed loop proportional
gain 2
1 to 100 20
☆
F2-04
Speed loop integral time
2
0.01s to 10.00s 1.00s
☆
F2-05 Switchover frequency 2 F2-02 to maximum frequency 10.00 Hz
☆
F2-06
Vector control slip
compensation gain)
50% to 200% 100%
☆
F2-07
Speed feedback lter time
in SVC
0.000s to 0.100s 0.015s
☆
F2-09
Torque limit source in
speed control
0: F2-10
1: AI1
2: AI2
3: AI3
4: Pulse reference (DI5)
5: Serial comms.
6: Min. (AI1, AI2)
7: Max. (AI1, AI2)
Full scale of 1-7 corresponds to F2-10.
0
☆
F2-10
Digital setting of torque
limit in speed control
0.0% to 200.0% 150.0%
☆
F2-11
Torque limit source
in speed control
(regenerative)
0: F2-12 (electrical or regenerative)
1: AI
2: AI2
3: AI3
4: Pulse reference
5: Communication reference
6: Min. (AI1, AI2)
7: Max. (AI1, AI2)
8: F2-12
Full scale of 1-7 corresponds to F2-12.
0
☆
F2-12
Digital setting of torque
limit in speed control
(regenerative)
0.0% to 200.0% 150.0%
☆
F2-13
Excitation adjustment
proportional gain
0 to 60000 2000
☆
F2-14
Excitation adjustment
integral gain
0 to 60000 1300
☆
F2-15
Torque adjustment
proportional gain
0 to 60000 2000
☆
F2-16
Torque adjustment
integral gain
0 to 60000 1300
☆
F2-17
Speed loop integral
separation selection
Units position: Integral separation
0: Disabled
1: Enabled
0
☆
F2-21
Max. torque coefcient of
eld weakening area
50% to 200% 100%
☆

 Loading...
Loading...