Appendix C
-
176
-
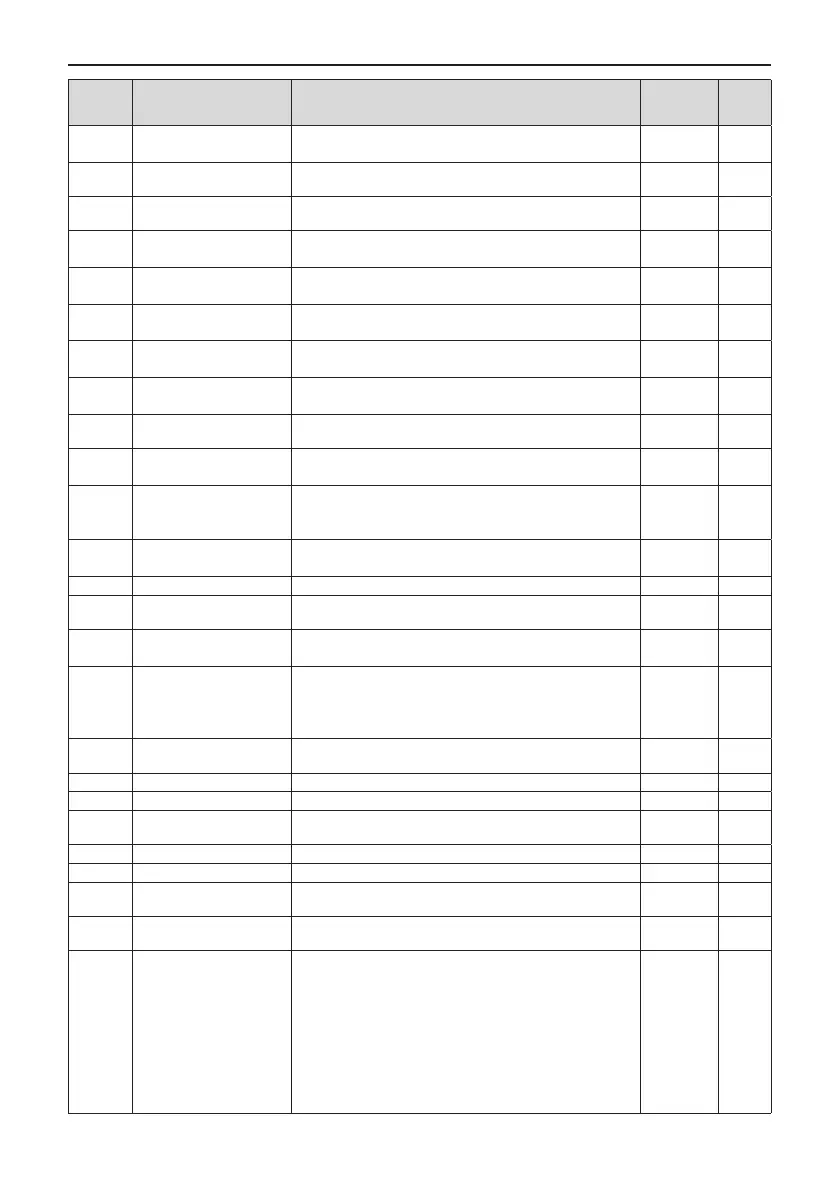
Function
Code
Name Setting Range Default Change
A2-03 Rated motor current
0.01 to 655.35 A (AC drive power ≤ 55 kW)
0.1 to 6553.5 A (AC drive power > 55 kW)
Model
dependent
★
A2-04 Rated motor frequency 0.01 Hz to max. frequency
Model
dependent
★
A2-05 Rated motor speed 1 to 65535 RPM
Model
dependent
★
A2-06 Stator resistance
0.001 to 65.535 Ω (AC drive power ≤ 55 kW)
0.0001 to 6.5535 Ω (AC drive power > 55 kW)
Model
dependent
★
A2-07 Rotor resistance
0.001 to 65.535 Ω (AC drive power ≤ 55 kW)
0.0001 to 6.5535 Ω (AC drive power > 55 kW)
Model
dependent
★
A2-08
Leakage inductive
reactance
0.01 to 6553.5 mH (AC drive power ≤ 55 kW)
0.001 to 655.35 mH (AC drive power > 55 kW)
Model
dependent
★
A2-09
Mutual inductive
reactance
0.1 to 6553.5 mH (AC drive power ≤ 55 kW)
0.01 to 655.35 mH (AC drive power > 55 kW)
Model
dependent
★
A2-10 No-load current
0.01 to A2-03 (AC drive power ≤ 55 kW)
0.1 to A2-03 (AC drive power > 55 kW)
Model
dependent
★
A2-27
Encoder pulses per
revolution
1 to 65535 1024
★
A2-28 Encoder type
0: ABZ incremental encoder
2: Resolver
0
★
A2-29
Speed feedback channel
selection
0: Local PG card
1: Extension PG card
2: Pulse input (DI5)
0
★
A2-30
A/B phase sequence of
ABZ incremental encoder
0: Forward
1: Reserve
0
★
A2-31 Encoder installation angle 0.0 to 359.9° 0.0°
★
A2-34
Number of pole pairs of
resolver
1 to 65535 1
★
A2-36
Encoder wire-break fault
detection time
0.0s: No detection
0.1s to 10.0s
0.0
★
A2-37 Auto-tuning selection
0: No auto-tuning
1: Asynchronous motor partial static auto-tuning
2: Asynchronous complete dynamic auto-tuning
3: Asynchronous complete static auto-tuning
0
★
A2-38
Speed loop proportional
gain 1
1 to 100 30
☆
A2-39 Speed loop integral time 1 0.01s to 10.00s 0.50s
☆
A2-40 Switchover frequency 1 0.00 to A2-43 5.00 Hz
☆
A2-41
Speed loop proportional
gain 2
1 to 100 20
☆
A2-42 Speed loop integral time 2 0.01s to 10.00s 1.00s
☆
A2-43 Switchover frequency 2 A2-40 to maximum frequency 10.00 Hz
☆
A2-44
Vector control slip
compensation gain)
50% to 200% 100%
☆
A2-45
Speed loop lter time
constant
0.000s to 0.100s 0.000s
☆
A2-47
Torque limit source in
speed control
0: Set by A2-48
1: AI1
2: AI2
3: AI3
4: Pulse reference
5: Communication reference
6: Min. (AI1, AI2)
7: Max. (AI1, AI2)
Full scale of 1-7 corresponds to A2-48.
0
☆

 Loading...
Loading...