Technical data
Page 45
4.5.1 Resolver connector [X2A]
The 9-pin D-SUB connector [X2A] is used to evaluate standard resolvers. Single- and multi-pole resolvers are supported. The
number of pole pairs of the resolver must be specified by the user in the "Motor Data" menu of the item Motion Soft
®
parameterisation program so that the item C 3-Series can determine the speed correctly. The number of pole pairs of the
motor (P
0motor
) is always an integer multiple of the number of pole pairs of the resolver (P
0resolver
). Incorrect combinations, e.g.
P
0resolver
= 2 and P
0motor
= 5, will result in an error message during the motor identification process.
The resolver offset angle, which is automatically determined during the identification process, is a read/write value for service
purposes.
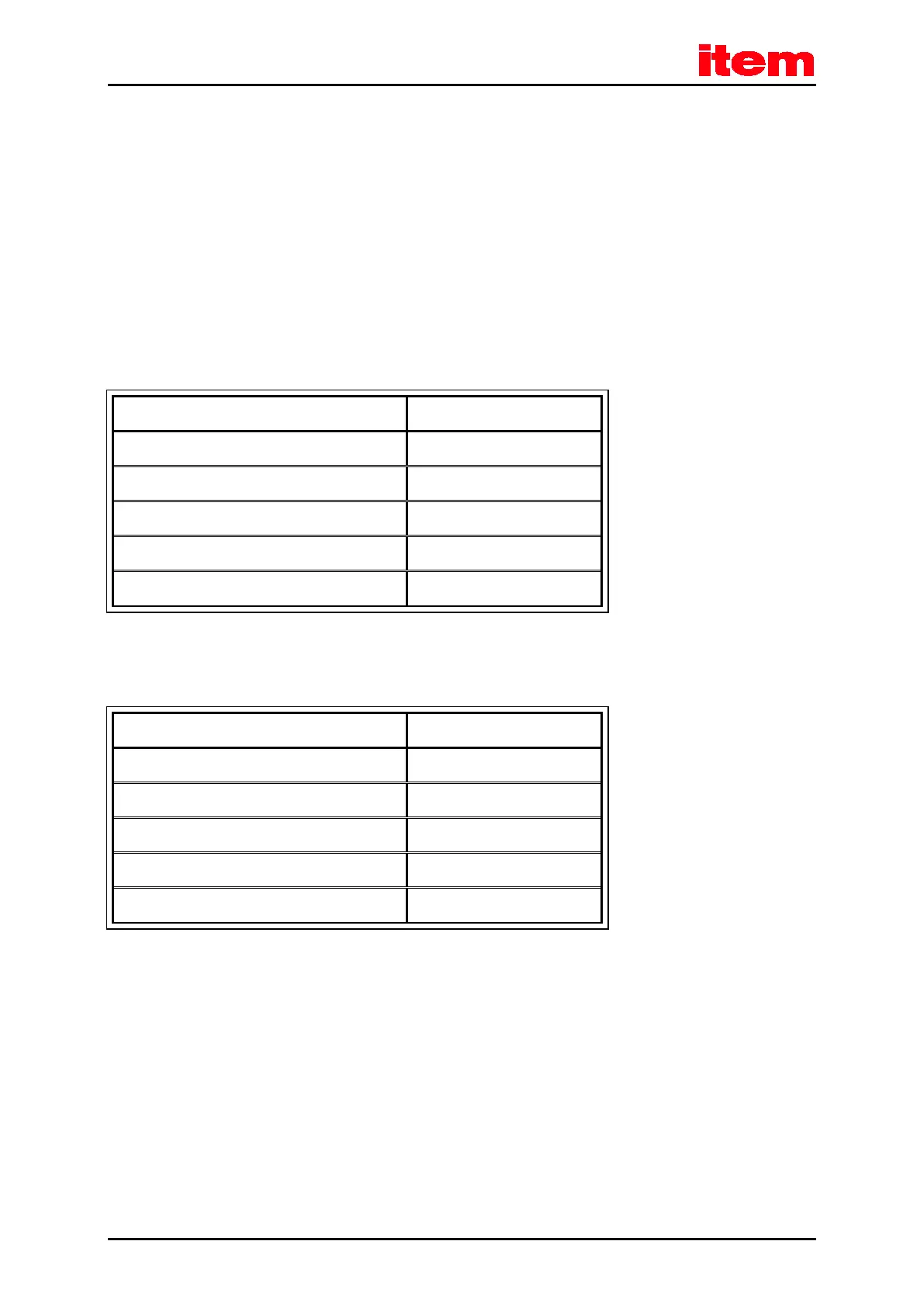
Table 18: Technical data: resolver [X2A]
Transformation ratio 0.5
Carrier frequency 5 to 10 kHz
Excitation voltage 7 V
RMS
, short circuit-proof
Excitation impedance (at 10 kHz) ≥ (20 + j20) Ω
Stator impedance ≤ (500 + j1000) Ω
Table 19: Technical data: resolver interface [X2A]
Resolution 16 bits
Signal detection delay < 200 µs
Speed resolution approx. 4 rpm
Absolute angle detection accuracy < 5 ´
Max. speed 16,000 rpm

 Loading...
Loading...