l OFF(0)=Compensationswitchedoff
l EPSRS(1)=Compensationasafunctionoftheelectricalangle,
Smalltablewith250elements,P380[]-CON_TCoggAddTab[252],
F1:Compensationfunction1(incremental,‘rotary'recurring)
-Withoutoffsetanddelta,withtuning,withfader
-TeachingàCalculation:(385)=(1),(2)à(3)
l EPSM(3)=Compensationasafunctionofthemechanicalangle,
Bigtablewith4000elements,flashimage[4005],
F1:Compensationfunction1(incremental,‘rotary'recurring)
-Withoutoffsetanddelta,withtuning,withfader
-TeachingàCalculation:(385)=(6),(11),(12)à(8)
l ABSPOS(2)=Compensationasafunctionoftheabsoluteposition,
ENCPOS(4)=Compensationasafunctionoftheabsoluteposition,
Bigtablewith4000elements,flashimage[4005],
F2:Compensationfunction2(absolute,'linear'continuous)
-Withoffsetanddelta,withtuning,withoutfader
-TeachingàCalculation:(385)=(5),(7),(9),(10)à(3)
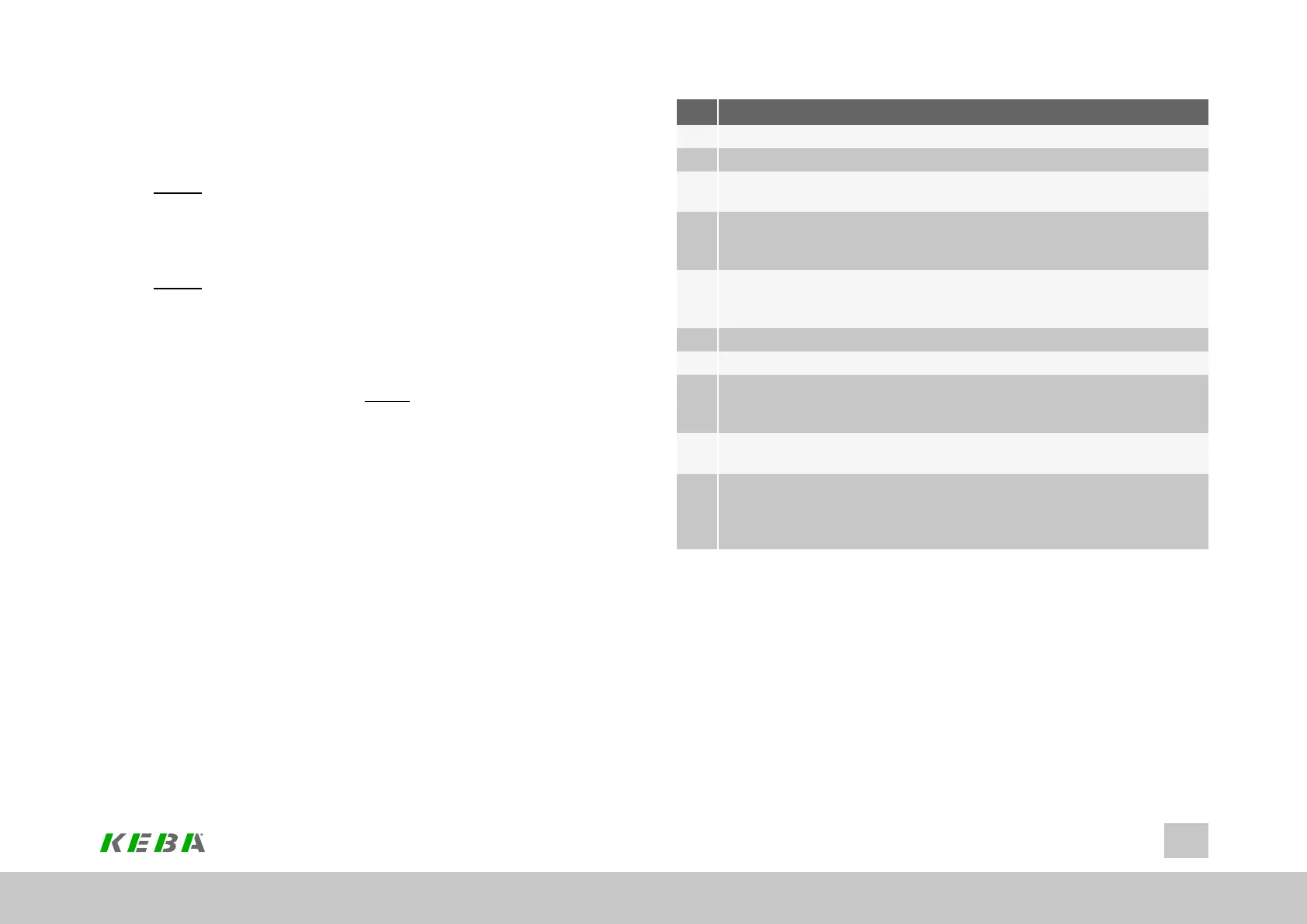
7.3.5.3Procedurefordetenttorquecompensation
The following table shows the procedure for detent torque compensation.
ID No.: 0842.26B.5-01Date: 09.2020
ServoOne- Device Help
122
7 Control
No. Action
1 Openmanualmodewindow
2 Speedcontrolmodecontrolsetting(sethighrigidity,forsmoothrunning)
3
Settheteachingdirectionifnecessary:P 445[0] - CON_TAB_TeachDir
Default:POS(1)=teachingroutineinpositivedirection.
4
Settheoffsetanddeltaifnecessaryusing:
P 442[0] - CON_TAB_PosStart,default0
P 443[0] - CON_TAB_PosDelta,default1000inc/TabElement
5
Settheinputtuningifnecessaryusing:
P 447[0] - CON_TAB_Tune.TimeDelay,default0
P 447[1] - CON_TAB_Tune.PosShift,default0
6 Startcontrol
7 Runmotoratlowspeed(≤1rpm)
8
Setthepositionsourcefortheteaching,activateteaching:Select
P 385[0] - CON_TCoggTeachCon > 0.
àTheteachingroutinebegins(possiblyonlywithPosStart,however).
9
Moveatleast1motorrevolutioninthesamedirection
(internalfiltertime).
10
Withthecontrolstilloperating,theteachingisthenstoppedbycallingthe
calculationfunctiononce:
P 385[0] - CON_TCoggTeachCon = (3)CALC1 or (8)CALC2.Afterwards,
parameterP385[0]jumpsbacktoREADY(0).
Table 7.4: Overall procedure for detent torque compensation
 Loading...
Loading...


