P No. Index Name / Setting Unit Description
Splinell(3) Cubicsplineinterpolation:
OnlyonrequestfromKEBA.
NonIPSpline(4) Cubicsplineapproximation:
Inthismethodtheinterpolationpointsare
approximatedbymeansofB-splines.The
trajectorynormallydoesnotrunexactlythrough
thepointsspecifiedbythecontrol.The
deviationisnormallynegligiblysmall.Inthe
interpolationpointsthetransitionsare
continuouswithregardtoacceleration,which
becomesapparentbyminor"noise".Instartand
targetpositiontheinterpolationpointsalways
matchthetrajectory.
Usage:minimizingnoise,smoothermotion,
restrictionsoncontouring
Cos(5) Cosineinterpolation:
Theinterpolationformulacorrespondstoa
Fouriertrendoftheunknowninterpolants.
Table 8.18: Interpolation types ServoOne (continue)
When using NonIpSpline, superimposed external feed-forward control can be used.
The controller must write the feed-forward control values to the corresponding
reserved parameters in the relevant bus system. All decelerations should be
disabled in the controller.
P 375[0] - CON_IP_SFFScale and P 376 - CON_IP_TFFScale must be used to
perform the scaling required for the internal units. The result can be viewed in the
scope by using scope variables 101 - nref_EXT and 102 - mref_EXT. If the scaling
appears to be OK, use P379 - CON_IP_FFMode to switch to the external feed-
forward control.
ID No.: 0842.26B.5-01Date: 09.2020
ServoOne- Device Help
251
8 Motion profile
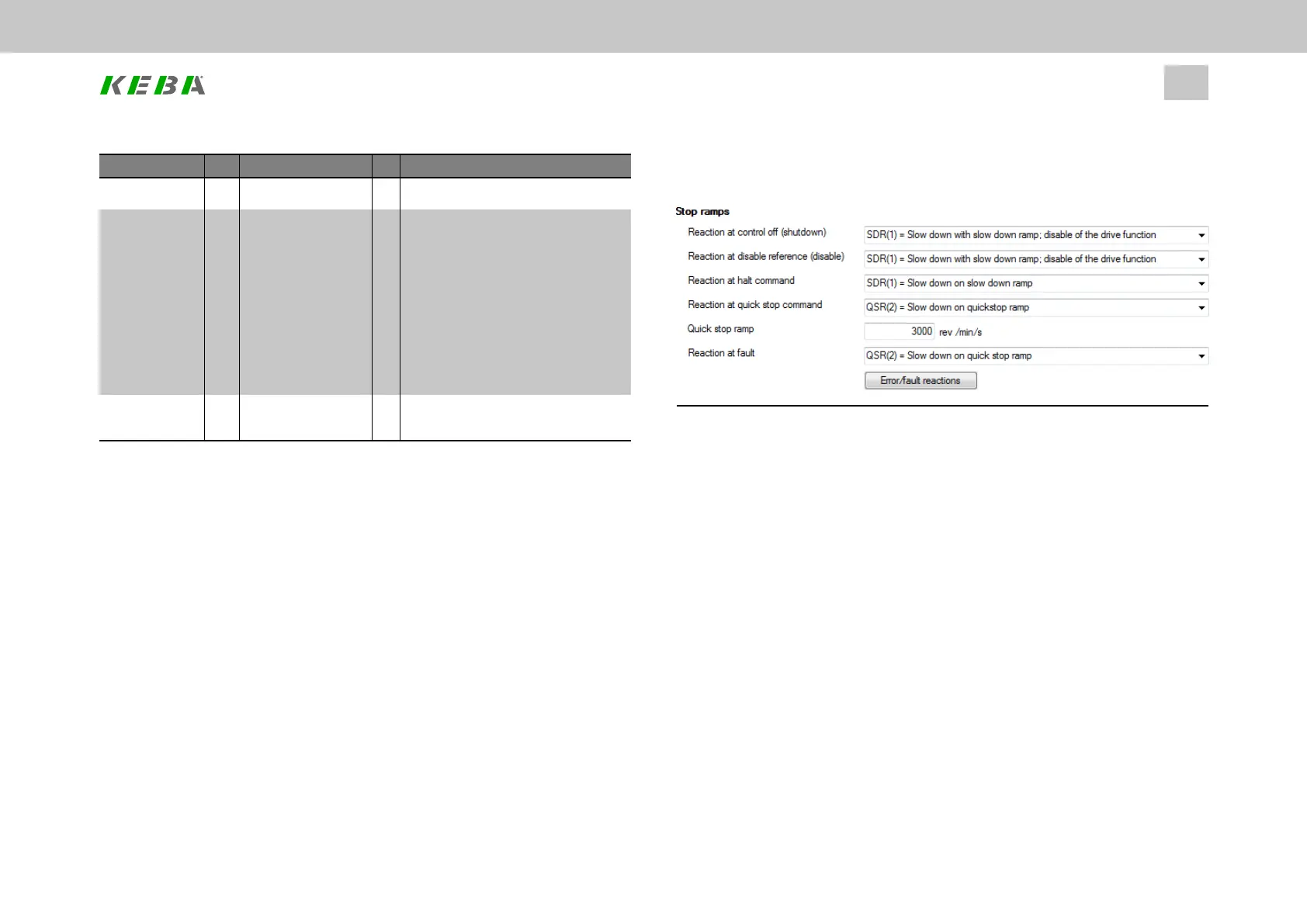
8.4Stopramps
Image 8.37: “Stop ramps” screen
Each reference source has its own acceleration and braking ramps. There are also
the stop ramps (quick-stop ramp), according to the
.CiA 402 standard. The ramp functions are only effective in certain system states.
The required settings can be selected from the screen. Clicking the "Error/Error
reactions" button directly accesses the screen for the error reactions.
Stop ramps in torque control
When in torque control mode (TCON), if one of the following occurs:
l Thecontrolisshutdown
l Thesetpointisdisabled
l Stop
l Quickstop
l Error
the set ramps will be performed in rpm.
 Loading...
Loading...


