7.5Positioncontrollersettings
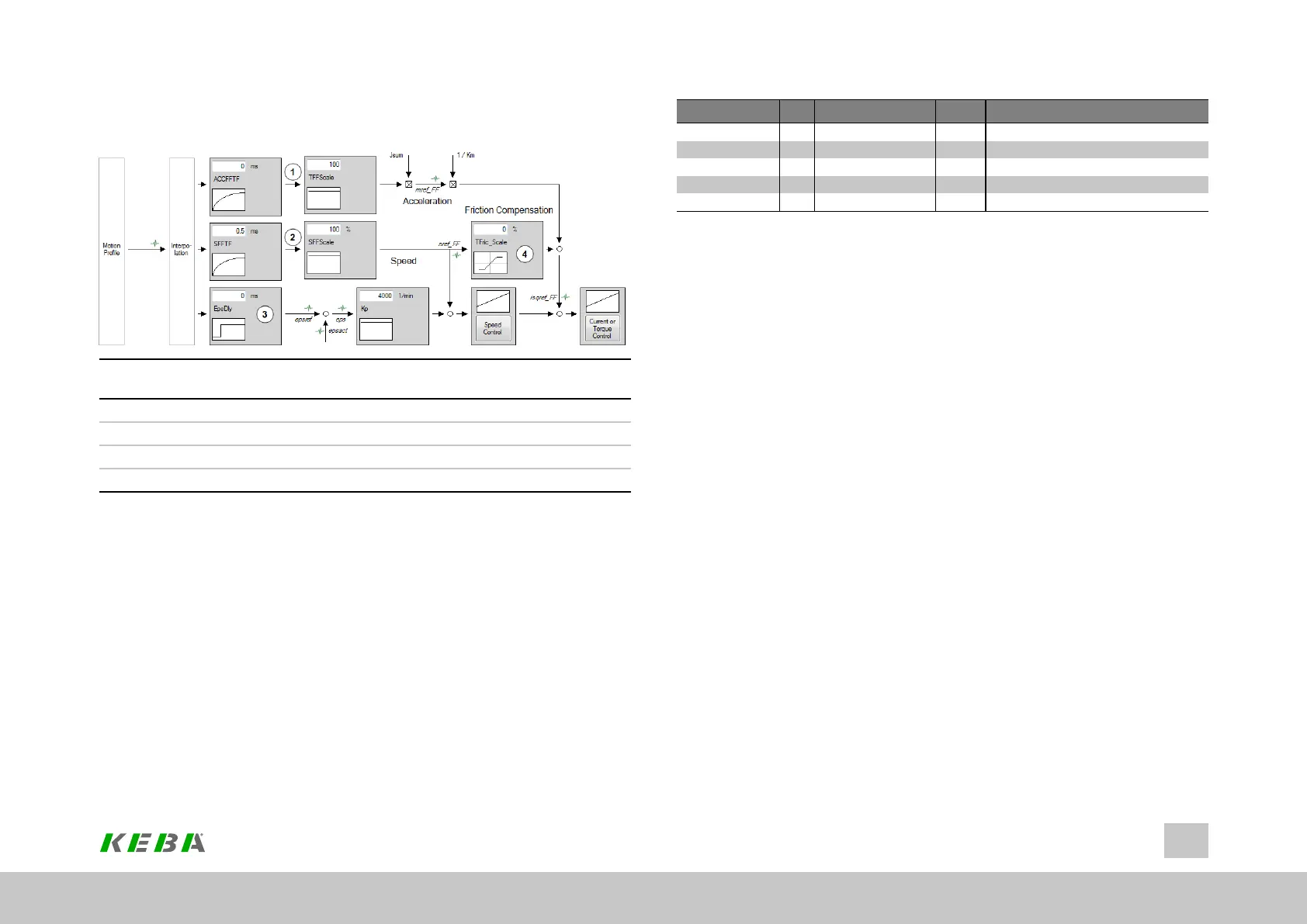
Image 7.30: “Configuration of position controller and feed forward control” screen
①
Delaytimeandscalingfortorquepre-control
②
Delaytimeandscalingforspeedpre-control
③
Delaytimeforpositionpre-control
④
Scalingoffrictiontorque
Legend for “Configuration of position controller and feed forward control” screen
The higher the dynamism of the speed controller, the more dynamically the position
controller can be set and the tracking error minimized. The variables for the pre-
control of the speed and position controller are additionally determined either from
the change in reference values or alternatively are already calculated and outputted
by the motion control. The time-related values for the position, speed and torque are
transmitted to the drive control. If the dynamic change in these values is within the
limits which the drive is able to follow dynamically, the load on the controllers is
significantly reduced. In order to improve the dynamism of the position controller, the
following screen is provided to optimize the speed and acceleration pre-control.
ID No.: 0842.26B.5-01Date: 09.2020
ServoOne- Device Help
142
7 Control
ID Index Name Unit Description
276 0 MPRO_FG_UsrActPos mDegree Actualpositioninuserunits
277 0 MPRO_FG_UsrRefPos mDegree Setpointpositioninuserunits
279 0 MPRO_FG_UsrPosDiff mDegree Positiontrackingerrorinuserunits
305 0 CON_PConTS ms Positioncontrolsamplingtime
360 0 CON_PCON_Kp 1/min Positioncontrolgain
Table 7.20: “Position controller” parameters
7.5.1Pre-control
l Thepre-controloftheaccelerationtorquerelievesthestrainonthespeed
controllerandoptimizesthecontrolresponseofthedrive.Tobeabletopre-
controltheaccelerationtorque,themassinertiareferredtothemotorshaft
mustbeknown.Iftheparameterfortheoverallmassinertiaofthesystem
(P 1516[0] - SCD_Jsum)hasavalue≠0,thatvaluewillbeautomatically
usedtopre-controltheaccelerationtorque.
l Thepre-controlofthespeedreferenceissetto100%viaP 375[0] - CON_
IP_SFF_Scale.Thisvalueshouldnotbechanged.
l Theaccelerationtorquepre-controlcanbeoptimizedwithP 376[0] - CON_
IP_TFF_Scale.Reducingthisreducesthepre-controlvalue;conversely,
increasingthisvaluealsoincreasesthepre-controlvalue.
l Thepositiontrackingerrorcanbefurtherreducedbypredictivetorqueand
speedpre-control–thatis,inadvanceofthepositionreferencesetting.
Owingtothetime-discretemodeofoperationofthecontrolcircuitsandthe
limiteddynamismofthecurrentcontrolcircuit,thispredictionisnecessaryto
preventtheindividualcontrolcircuitsfromoscillatingagainstoneanother.
Predictioninpre-controlisachievedbyretardingthereferencesforspeed
andpositioncontrollers.
 Loading...
Loading...


