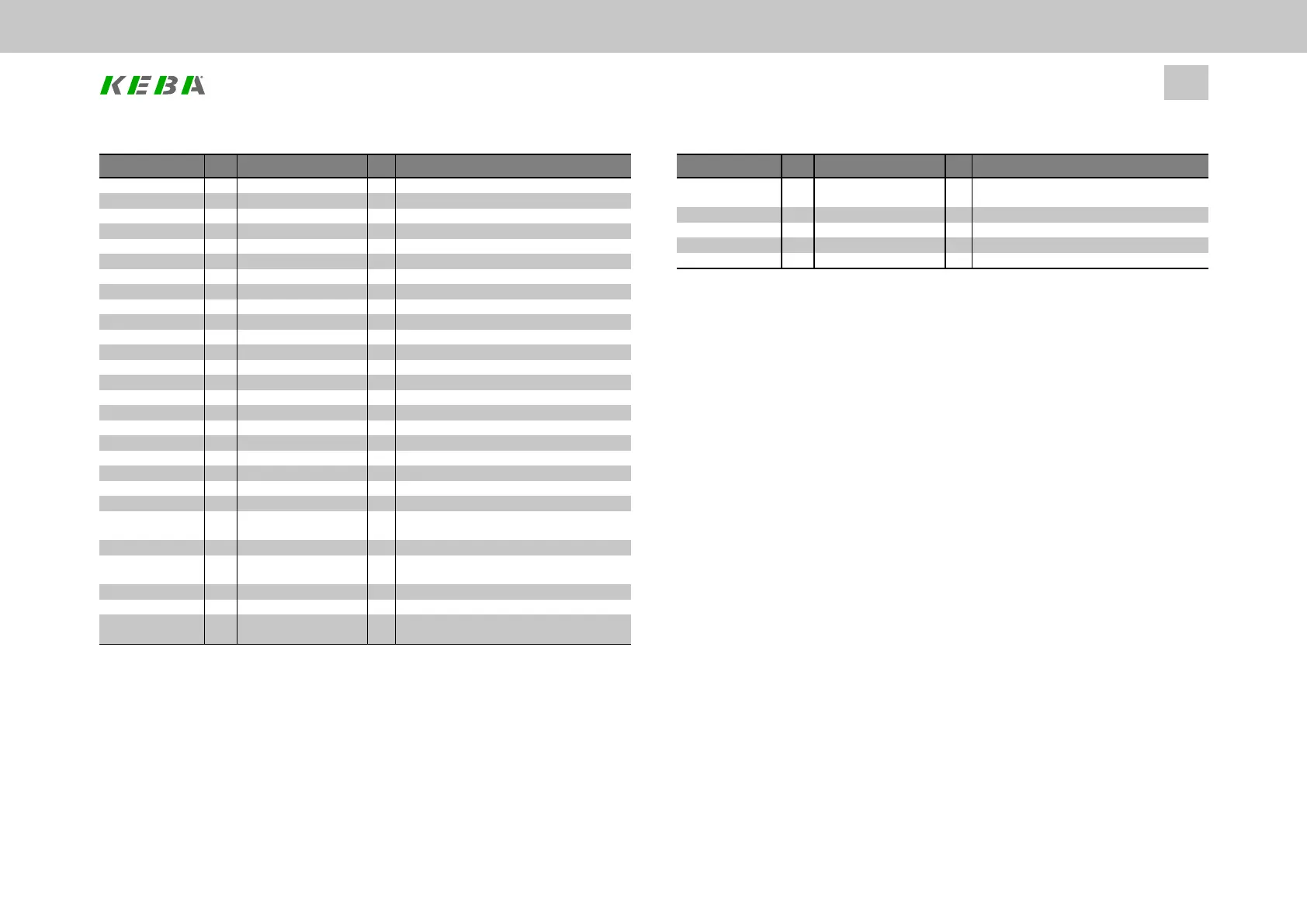
ID Index Name Unit Description
342 6 CON_FM_SpeedTab %
342 7 CON_FM_SpeedTab %
343 CON_FM_ImagTab Magnetizingcurrentscalingvs.speed
343 0 CON_FM_ImagTab %
343 1 CON_FM_ImagTab %
343 2 CON_FM_ImagTab %
343 3 CON_FM_ImagTab %
343 4 CON_FM_ImagTab %
343 5 CON_FM_ImagTab %
343 6 CON_FM_ImagTab %
343 7 CON_FM_ImagTab %
343 8 CON_FM_ImagTab %
343 9 CON_FM_ImagTab %
343 10 CON_FM_ImagTab %
343 11 CON_FM_ImagTab %
343 12 CON_FM_ImagTab %
343 13 CON_FM_ImagTab %
343 14 CON_FM_ImagTab %
343 15 CON_FM_ImagTab %
344 0 CON_FM_VConTF ms Voltagecontrolfiltertimeconstant
345 0 CON_FM_VConKp A/V Voltagecontrolgain
346 0 CON_FM_VConTn ms Voltagecontrolintegrationtimeconstant
347 0 CON_FM_VRef % Voltagecontrolreference(relativetomaximum
voltage)
348 0 CON_FM_SlipCon % Slipcontrolgainforfieldweakening
435 0 CON_FM_FWMode Modeoffieldweakening/d-currentcalculation
(PSM)
436 0 CON_FM_FWSpeedScale % Speedscalingforfieldweakening(tablemode)
437 0 CON_FM_FWCurrScale % q-currentscalingforfieldweakening(tablemode)
438 0 CON_FM_
FWMaxBackEMF
V Maximumback-EMFinfieldweakeningmode
(DClinkvoltage)
Table 7.24: “Field-weakening” parameters (continue)
ID No.: 0842.26B.5-01Date: 09.2020
ServoOne- Device Help
147
7 Control
ID Index Name Unit Description
421 CON_FM_FWTabIdx Tableindexforfieldweakening/reluctance
torqueutilization
421 0 CON_FM_FWTabIdx Speedindex
421 1 CON_FM_FWTabIdx Torqueindex
422 0 CON_FM_FWTabId A d-currenttableentry
423 0 CON_FM_FWTabIq A q-currenttableentry
Table 7.25: “Field weakening - Interior permanent magnet synchronous motor
(IPMSM)” parameters
7.6.4Field-weakeningofasynchronousmotorvoltage
controller
The voltage controller is superimposed onto the selected characteristic curve. When
the voltage controller is used, a part of the available voltage is used as a control
reserve. The more dynamic the operation, the more control reserve is required. In
this case it may be that the voltage for rated operation is not sufficient, and also that
the controller starts to oscillate.
The PI voltage controller can be optimized by adaptation of the gain P345[0] -
CON_FM_VConKp, integral-action time P346[0] - CON_FM_VConTn and filter time
constant for motor voltage feedback P344[0] - CON_FM_VConTF. P347[0] - CON_
FM_VRef sets the voltage reference, though the threshold needs to be reduced in
response to rising demands as this maintains a kind of voltage reserve for dynamic
control processes.
A certain voltage reserve is required for stable operation. This is specified using P
347[0] - CON_FM_VRef (< 100%). The value should be set high (≤ 90%) where
there are high demands in terms of dynamic performance. When using a lower
dynamic performance instead, the maximum achievable torque can be optimized in
relation to the current by using higher values (> 90%).
 Loading...
Loading...


