7.11.6HydraulicMotionprofile
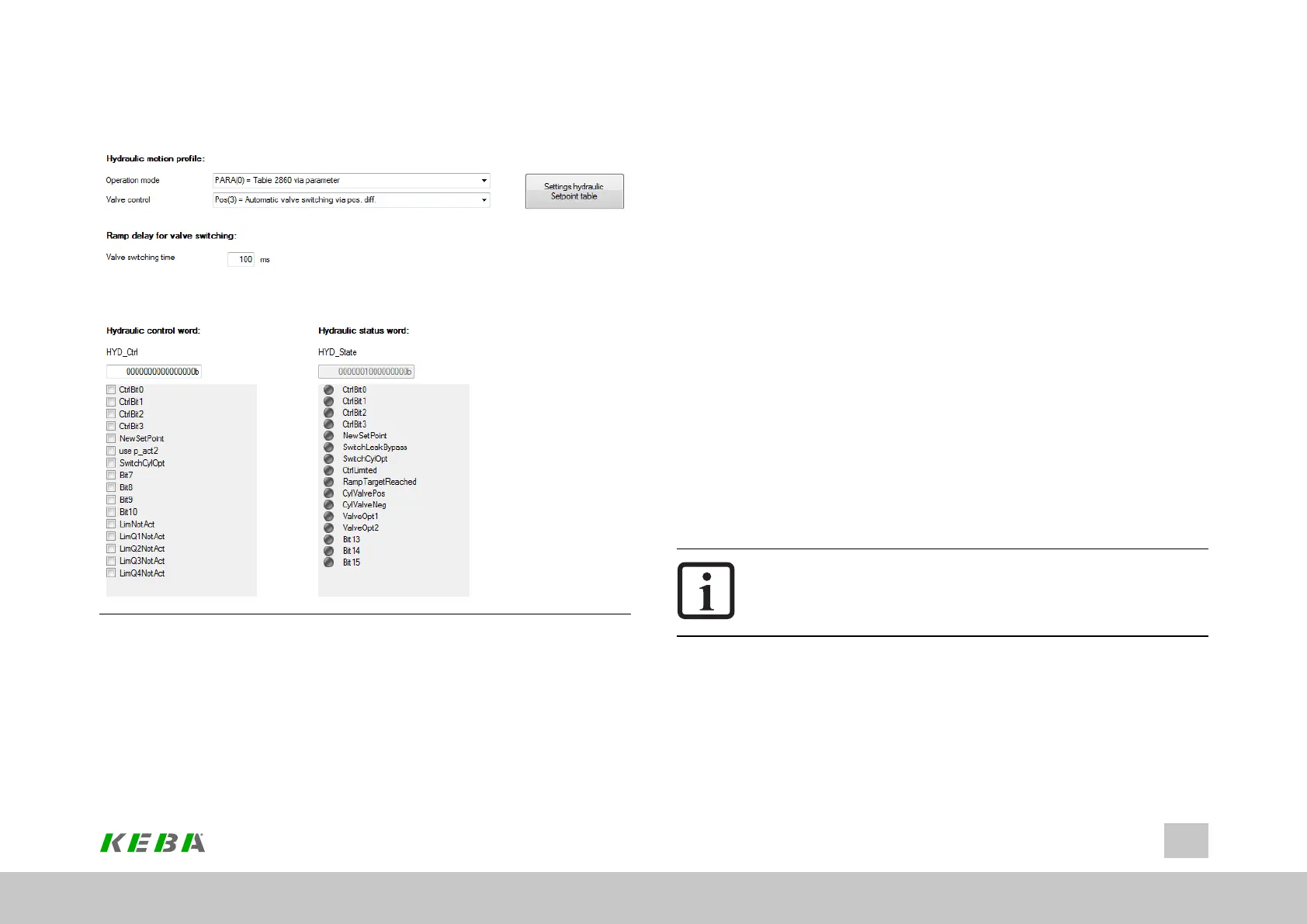
Image 7.65: “Hydraulic Motion profile” screen
The various different operating modes for controlling the motion sequences can be
selected using P 2862[0] - OpMode.
The parameter P 2840[11] -CylValveSwSel can be used to set various different
modes for controlling the actuating valves. Valve switching can be performed
automatically via the POS(3) mode depending on the position difference or be
ID No.: 0842.26B.5-01Date: 09.2020
ServoOne- Device Help
192
7 Control
specified manually for each individual table index. In addition, the valve switching
delay can be taken into account; the start of the setpoint ramp is delayed after a
valve switchover (P 2851.13 - tSwValve). Once the command for the switchover of a
valve has been triggered, a timer begins to run which delays the setpoint enable. If
the motor still has a speed reference value at the moment of the switchover, it is run
down to 0 rpm using the ramp specified in P 2851.12 - stopRamp.
Selection of operation mode
l 0 = PARA
Setpointsettingfromtable,tableindex(P 2860)setusingparameteraccess
(BUS,iPLC,,etc.)(rampchangesareappliedwhentheindexchanges)
l 1 = TERM
Settingfromtable,tableindex(P 2860)willbeupdatedviadigitalinputs
(rampchangeswillbeappliedwhentheindexchanges)
l 2 = CTRL1
Operationviacontrolword.Onlyparametersfromtableindex0areusedin
theCTRL1mode.Thecontrolmodeissetviathecontrolword(CtrlBit0-3)
andthesetpointvaluescanbechangeddirectlyintableindex0.
l 3 = CTRL2
Operationviacontrolword.Parametersfromalltableindexescanbeusedin
CTRL2mode.Therespectivemotionblockisselectedusingthecontrolword
(CtrlBit0-3).
NOTE
l InCTRL1andCTRL2,thesetpointisadoptedcyclically
independentlyofNewSetpointandrampchangewithrisingedge
atNewSetpointornewtableindex)
l 4 = TAB
Setpointsettingfromtable,tableindex(P 2860)iscontrolledusingthe
switchingconditionofthemotionblocktable.
 Loading...
Loading...


