ID Index Name Unit Description
371 0 CON_IP_RefTF ms Speedreferencefiltertimeconstant(SCON
mode)
304 0 CON_SConTS ms Speedcontrolsamplingtime
2939 0 CON_SCON_TorqueTF ms Actualtorquefiltertime
Digitalfilter Digitalfilter/speedcontrollersettings
325 CON_SCON_FilterFreq Filterfrequenciesofdigitalfilter
325 0 CON_SCON_FilterFreq Hz 1stcenter/cutoff
325 1 CON_SCON_FilterFreq Hz 1stwidth
325 2 CON_SCON_FilterFreq Hz 2ndcenter/cutoff
325 3 CON_SCON_FilterFreq Hz 2ndwidth
326 0 CON_SCON_FilterAssi Digitalfilterdesignassistant
327 CON_SCON_FilterPara Coefficientsofdigitalfilter
327 0 FilterParab0 b0*x(k)
327 1 FilterParab1 b1*x(k-1)
327 2 FilterParab2 b2*x(k-2)
327 3 FilterParab3 b3*x(k-3)
327 4 FilterParab4 b4*x(k-4)
327 5 FilterParaa1 a1*y(k-1)
327 6 FilterParaa2 a2*y(k-2)
327 7 FilterParaa3 a3*y(k-3)
327 8 FilterParaa4 a4*y(k-4)
1550 0 SCD_NotchType AdaptiveNotchfilter:Method
1551 0 SCD_NotchCntl AdaptiveNotchfilter:Controlword
1552 SCD_NotchFreq AdaptiveNotchfilter:Frequencies
1552 0 SCD_NotchFreq Hz AdaptiveNotchfilter:Frequency
1552 1 SCD_NotchLambda Hz/min^-
2
AdaptiveNotchfilter:Coefficient
1552 2 SCD_NotchMinFreq Hz Adaptivenotchfilter:Minimumfrequency
1552 3 SCD_NotchMaxFreq Hz Adaptivenotchfilter:Maximumfrequency
1552 4 SCD_NotchDeltaFreq Hz AdaptiveNotchfilter:Maximumfrequency
change(ineachiteration)
Analysisofspeedcontrol Advancedanalysisofthespeedcontroller
401 0 CON_SCON_AddTRef Nm(N) Additivetorquereference
402 0 CON_SCON_AddSRef 1/min Additivespeedreferencevalue(withoutramp)
Scopesignals(advanced)
Observer
Scopesignals(basic)
Table 7.12: “Speed controller” parameter (continue)
ID No.: 0842.26B.5-01Date: 09.2020
ServoOne- Device Help
135
7 Control
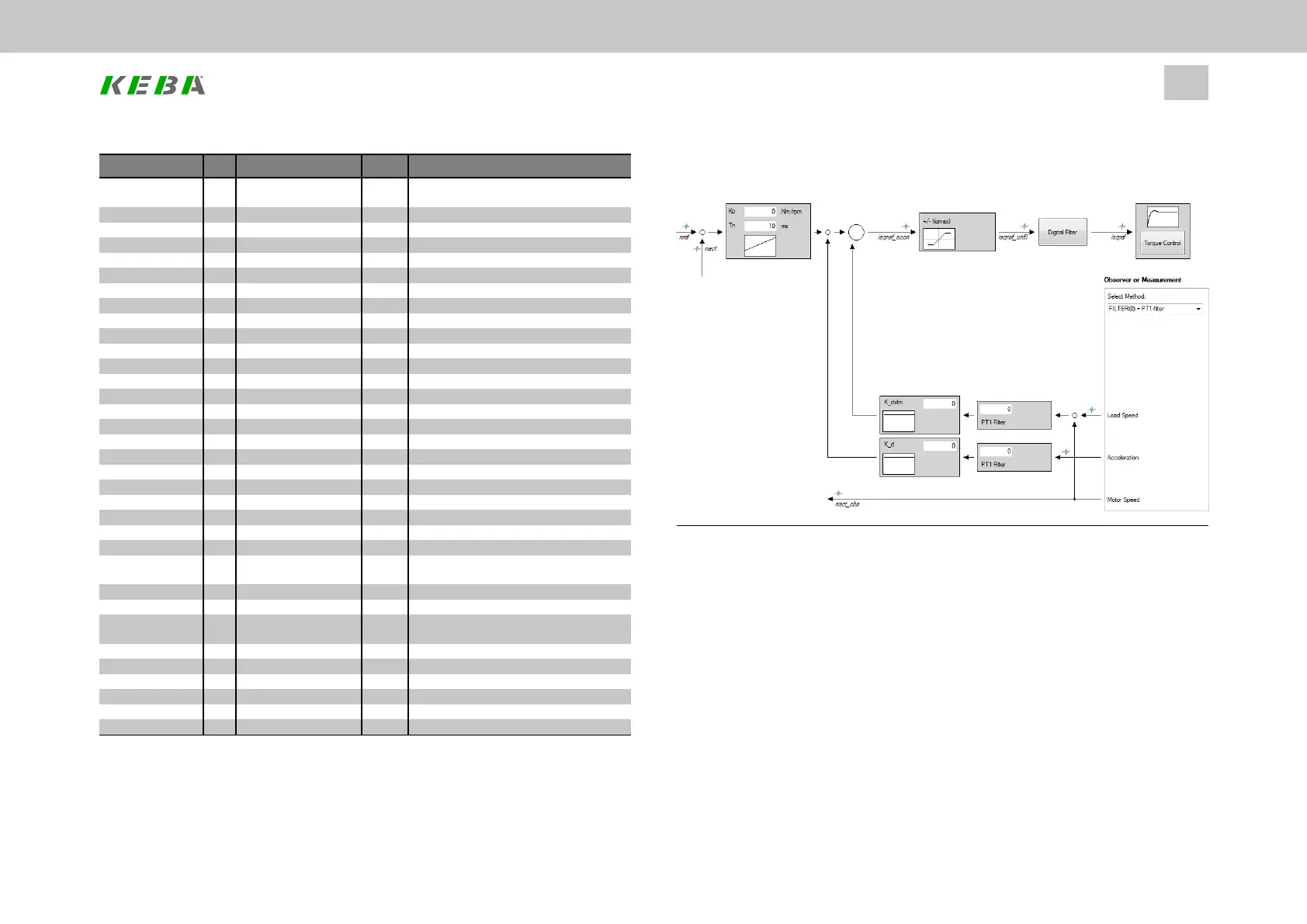
7.4.1Advancedspeedcontrol
Image 7.22: “Speed controller advanced setup” screen
7.4.1.1Speedobserver
The speed observer is a simple model of the path with motor current as input, as
estimation of load torque and feedback of the estimated error from encoder position
for speed control. The observer generates an estimation of motor speed that is used
as an alternative to the measured, filtered speed of the axis.
Procedure for using the observer
l Makesurethatthemassinertiaofthesystem(P 1516[0] - SCD_JSum)is
known.Todoso,determinetheinertiaofthesystem(seesection“Section
"Automaticinertiadetection"onpage114”),ifthishasnotyetbeendone.
 Loading...
Loading...


