CON_FM_SpeedTab[0] CON_FM_SpeedTab[1]
CON_FM_ImageTab[0...7]
i
d
/(CON_FM_Imag√2)
InI/n
N
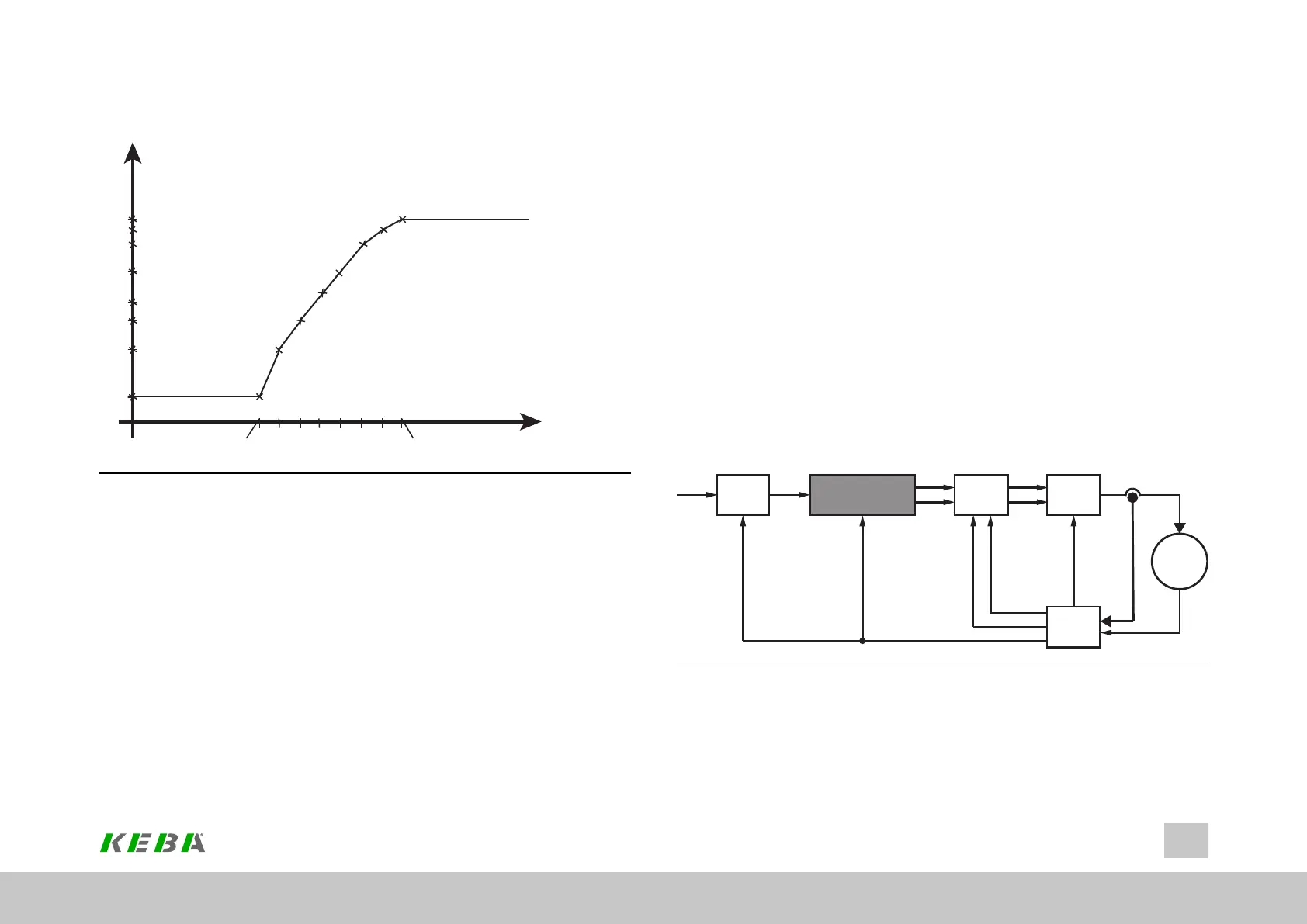
Image 7.35: Example of 8 data points with equidistant spacing over the speed
Notes:
1. Ifyoudonotwanttohavefieldweakening(id=0)forlowspeeds|n|<=P 342
- CON_FM_SpeedTab[0],thenP 343 - CON_FM_ImagTab[0]mustbesetto
0%(extrapolationbelowP 342 - CON_FM_SpeedTab[0]withavalueof0).
2. ThevaluesinP 342 - CON_FM_SpeedTab[2..7]andP 343 - CON_FM_
ImagTab[8..15]arenotusedinthismode.
ID No.: 0842.26B.5-01Date: 09.2020
ServoOne- Device Help
152
7 Control
7.7.5Variants3and6(LUT)
For motors with different inductances on the d and q axis, such as an IPMSM (interior
permanent magnet synchronous machine), a reluctance torque which is dependent
on the d and q current can be built up. A result of the exploitation of this torque is that
the control by means of q current alone (id is reduced to 0) (typical for non-salient
pole PMSM) is no longer adequate to make use of the machine’s full potential.
Consequently, special control structures are implemented in the ServoOne to ensure
optimal control for motors of this nature.
The control works in almost the same way as for the standard control circuit of a
PMSM, except that the direct axis ref. current is no longer zero, but instead, both
currents are dependent on the reference torque and the actual speed. To
accomplish this, the standard control circuit is enhanced to include generation of a
current reference value in the form of a LookUpTable (LUT). The current reference
value is generated by specifying the associated d and q currents based on the target
specification for the torque and the actual speed.
Speed
controller
Current
control
Pulse
inverter
IPMSM
Current,
speed
detection
Current reference value
(LUT)
nSoll TSoll
id, soll
iq, soll
ud, soll
uq, soll
id, ist
iq, ist
nist
iα, ist
εist
iβ, ist
εist
Image 7.36: Structure of the field weakening for a synchronous motor LookUp Table
These d and q-current reference values can
 Loading...
Loading...


