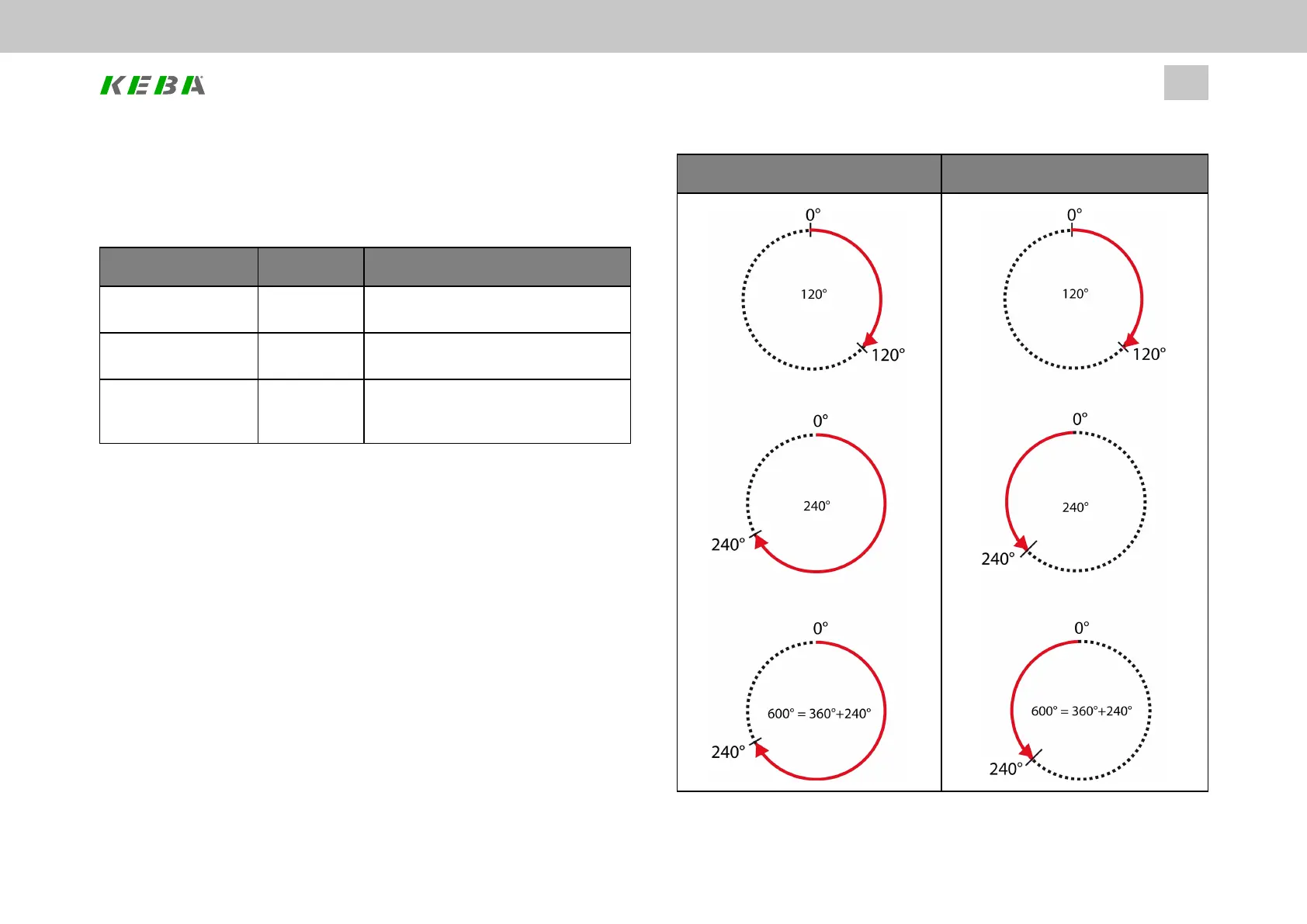
8.2.1.3Processoption“Path-optimized”
An absolute target position is always approached by the shortest path. Relative
movements cannot be carried out with the “path – optimized” mode.
Position range Example Effect
Targetposition<
circumference
120°<360°
Thedrivemovestothetargetposition
within360°.
Targetposition=
circumference
120°=120° Thedriveremainsinposition.
Targetposition>
circumference
600°-360°=
240°
Thedrivemovestothepositionwithin
thecircumference(targetposition-(nx
circumferentiallength))
Table 8.3: Path-optimized movement
ID No.: 0842.26B.5-01Date: 09.2020
ServoOne- Device Help
231
8 Motion profile
Not path-optimized Optimized path
Table 8.4: Path optimization diagram
 Loading...
Loading...


