6.4.7 Nodeguard
The Node Guarding protocol is a functional monitoring for the drive. It requires that the drive is accessed at reg-
ular intervals by the CANopen master.
The maximum time interval that is permitted between two Nodeguard telegrams is given by the product of the
Guard Time (Object 100Ch) and the Life Time Factor (Object 100Dh). If one of these two values is 0, then the
response monitoring is de-activated.
If the drive is not accessed within the time defined by objects 100Ch and 100Dh, then fault F129 (response mon-
itoring) appears on the drive, the drive is braked to a stop, and any other movement is prevented.
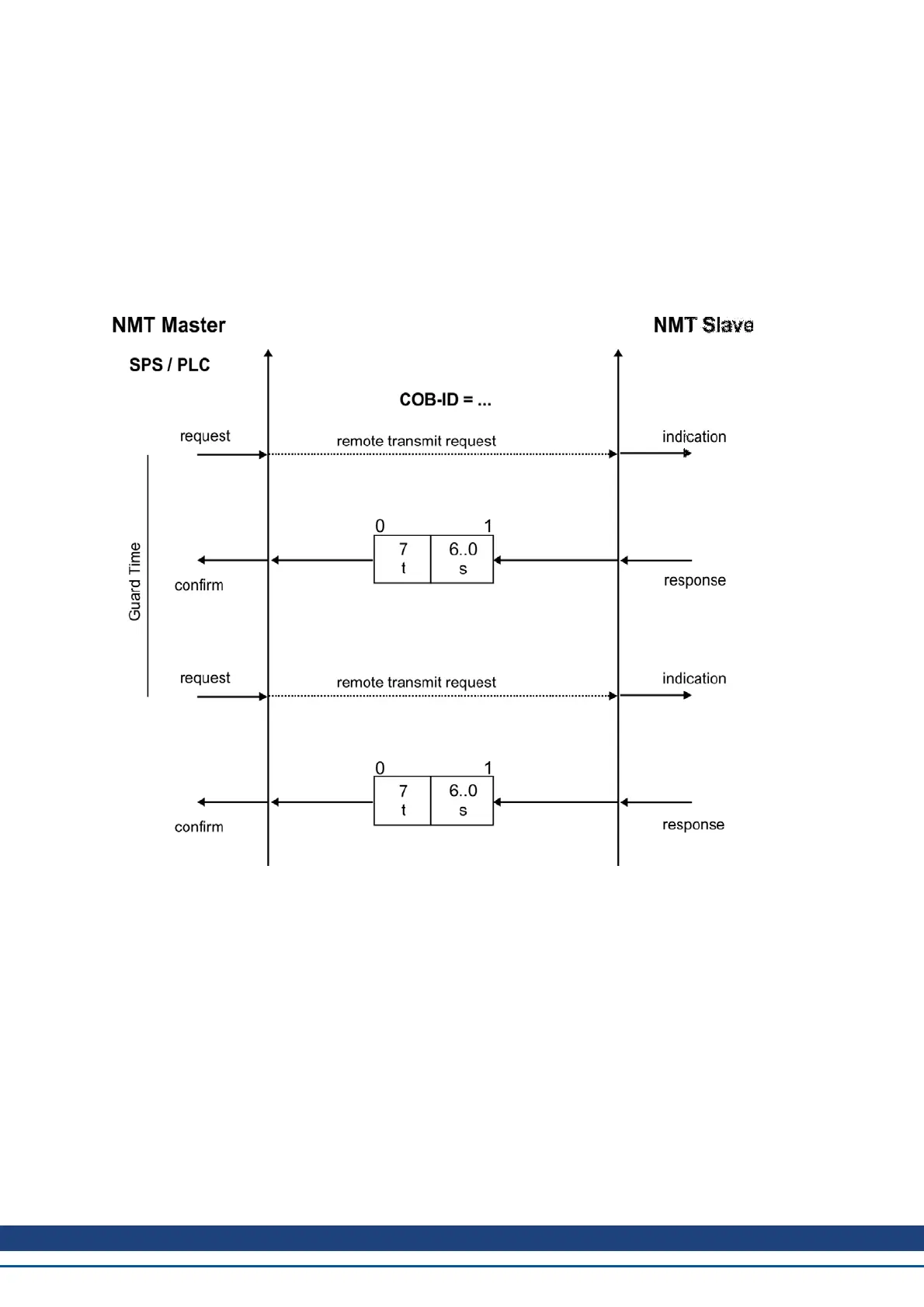
The time sequence for node guarding is as shown below:
t = toggle Bit, changes its status with every slave telegram
s = status of the NMT slave status machine
Node guarding is carried out by the Master through RTR telegrams with the COB-ID 700h + slave node address.
AKD CANopen | 6 CANopen Communication Profile
Kollmorgen™ | November 2012 39