AKD CANopen | 8 Appendix
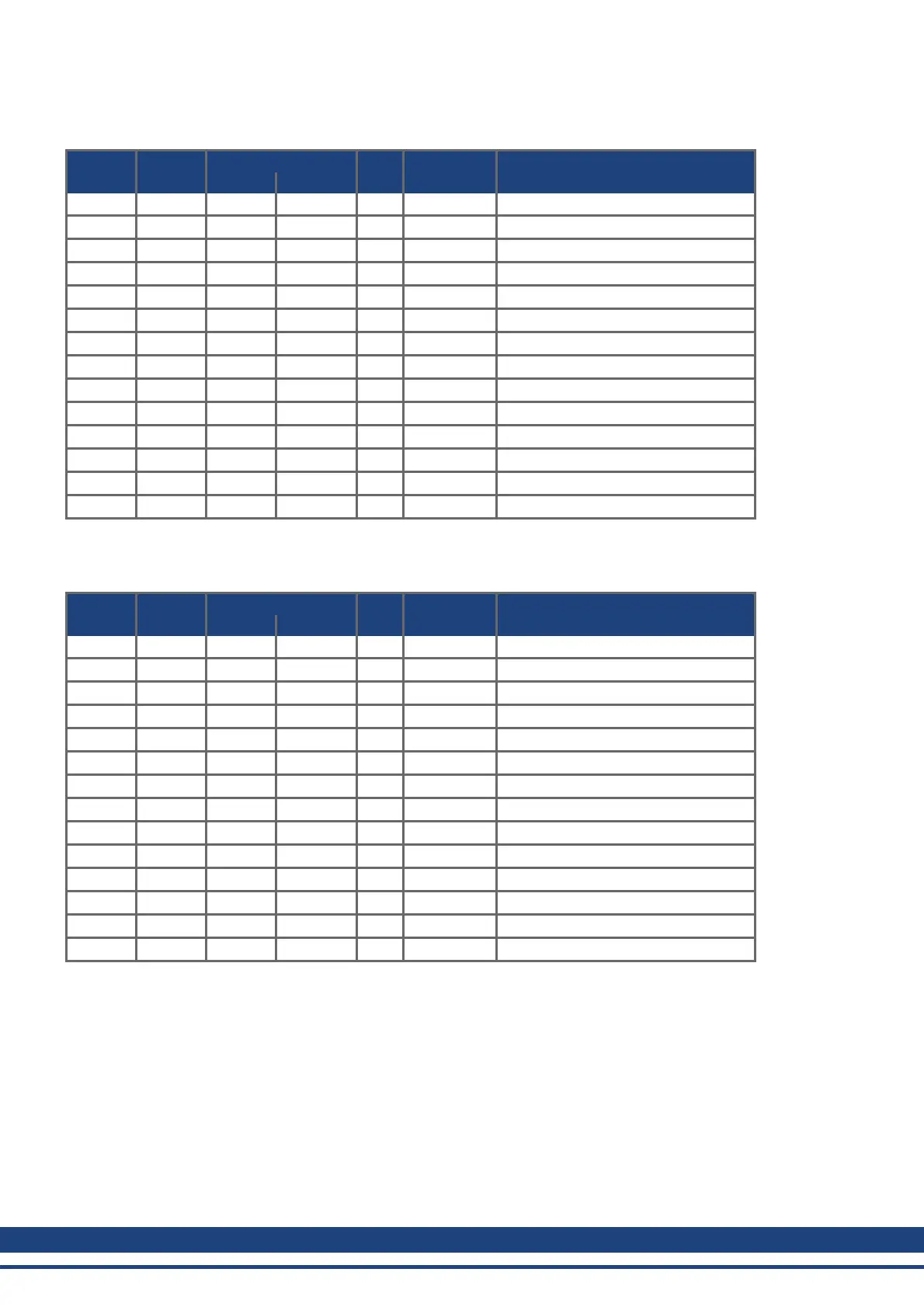
8.2.1.3 Example: Jog Mode via SDO
The motor shall work with constant velocity.
COB-ID Control Index Sub-
byte Low byte High byte index Data Comment
603 2F 60 60 00h 03 00 00 00 Mode of operation “Profile Velocity”
583 60 60 60 00h 00 00 00 00 response telegram
603 23 FF 60 00h 00 00 00 00 setpoint=0
583 60 FF 60 00h 00 00 00 00 response telegram
603 2B 40 60 00h 06 00 00 00 shutdown
583 60 40 60 00h 00 00 00 00 response telegram
603 2B 40 60 00h 07 00 00 00 switch on
583 60 40 60 00h 00 00 00 00 response telegram
603 2B 40 60 00h 0F 00 00 00 enable operation
583 60 40 60 00h 00 00 00 00 response telegram
603 23 FF 60 00h 00 41 00 00 velocity setpoint
583 60 FF 60 00h 00 00 00 00 response telegram
603 2B 40 60 00h 0F 01 00 00 Intermediate Stop
583 60 40 60 00h 00 00 00 00 response telegram
8.2.1.4 Example: Torque Mode via SDO
The motor shall work with constant torque. CAN data:
COB-ID Control Index Sub-
byte Low byte High byte index Data Comment
603 2F 60 60 00h 04 00 00 00 Mode of operation “Torque”
583 60 60 60 00h 00 00 00 00 response telegram
603 2B 71 60 00h 00 00 00 00 setpoint=0
583 60 71 60 00h 00 00 00 00 response telegram
603 2B 40 60 00h 06 00 00 00 shutdown
583 60 40 60 00h 00 00 00 00 response telegram
603 2B 40 60 00h 07 00 00 00 switch on
583 60 40 60 00h 00 00 00 00 response telegram
603 2B 40 60 00h 0F 00 00 00 enable operation
583 60 40 60 00h 00 00 00 00 response telegram
603 2B 71 60 00h 90 01 00 00 setpoint 400 mA
583 60 71 60 00h 00 00 00 00 response telegram
603 2B 40 60 00h 0F 01 00 00 intermediate Stop
583 60 40 60 00h 00 00 00 00 response telegram
140 Kollmorgen™ | November 2012