XGB Analog edition manual
15 - 6
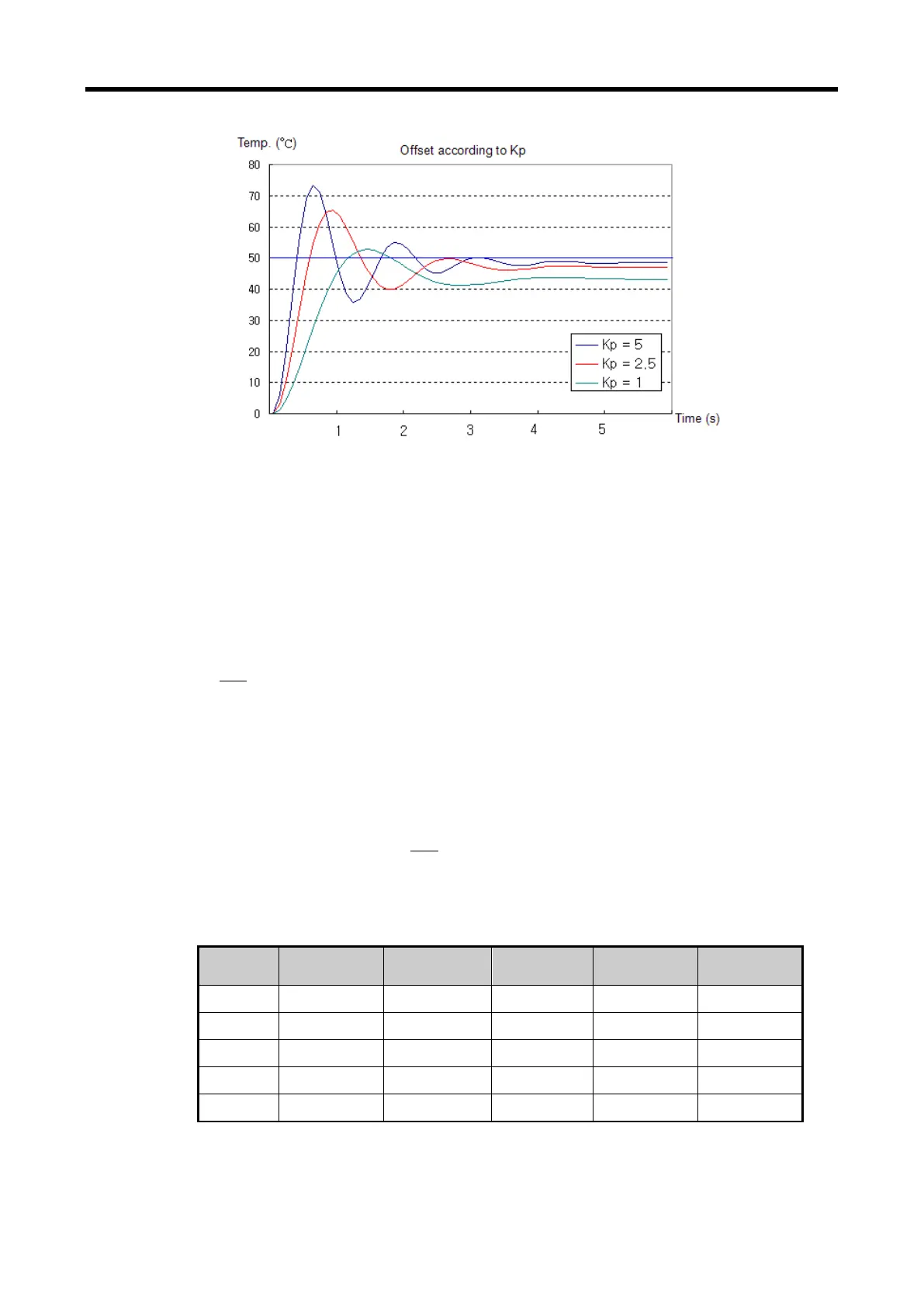
< Figure 15.3 Temperature- time graph according to P coefficient >
(c) Considering table 15.3, as P coefficient decreases, offset increases but overshoot decreases.
(d) Generally, offset can’t be solved with only P control. In order to remove the offset, P control
and I control is used together.
(4) Proportional Integral Control (PI Control)
In I control, it yields the output proportional to error accumulated according to time. And the
expression is as follows.
(a) In the expression 15.2.9, Ti means the time takes for MV
i,
output by I control, to be added into
real output.
(b) Generally, I control is used with P control. So the expression of PI control is as follows.
(c) In the above heating system, the simulation results are as shown in the table 15.4 when
proportional coefficient is 2.5 and integral time is 1.5s.
Edt
T
K
KEMVMVMV
i
P
PiP