BA053101-en
Pos: 146 /Tech nische D okumen tation/A lle G eräte/ Überschr iften/Üb ers chrifte n 1.1.1/A/ Übers chrift 1.1.1: Allrad-B etrieb @ 13\m od_1 23426 87176 04_7 5.docx @ 33745 3 @ 3 @ 1
Pos: 147 / Tec hnis che Dok um enta tion /L eistu n gsmes st echn ik/ POWE R DYNO /052 301 LPS 30 00 R 100/ BA /Inh al t: 05 23 A llra d- Betrieb @ 13\mod_1234268759573_75.docx @ 337479 @ @ 1
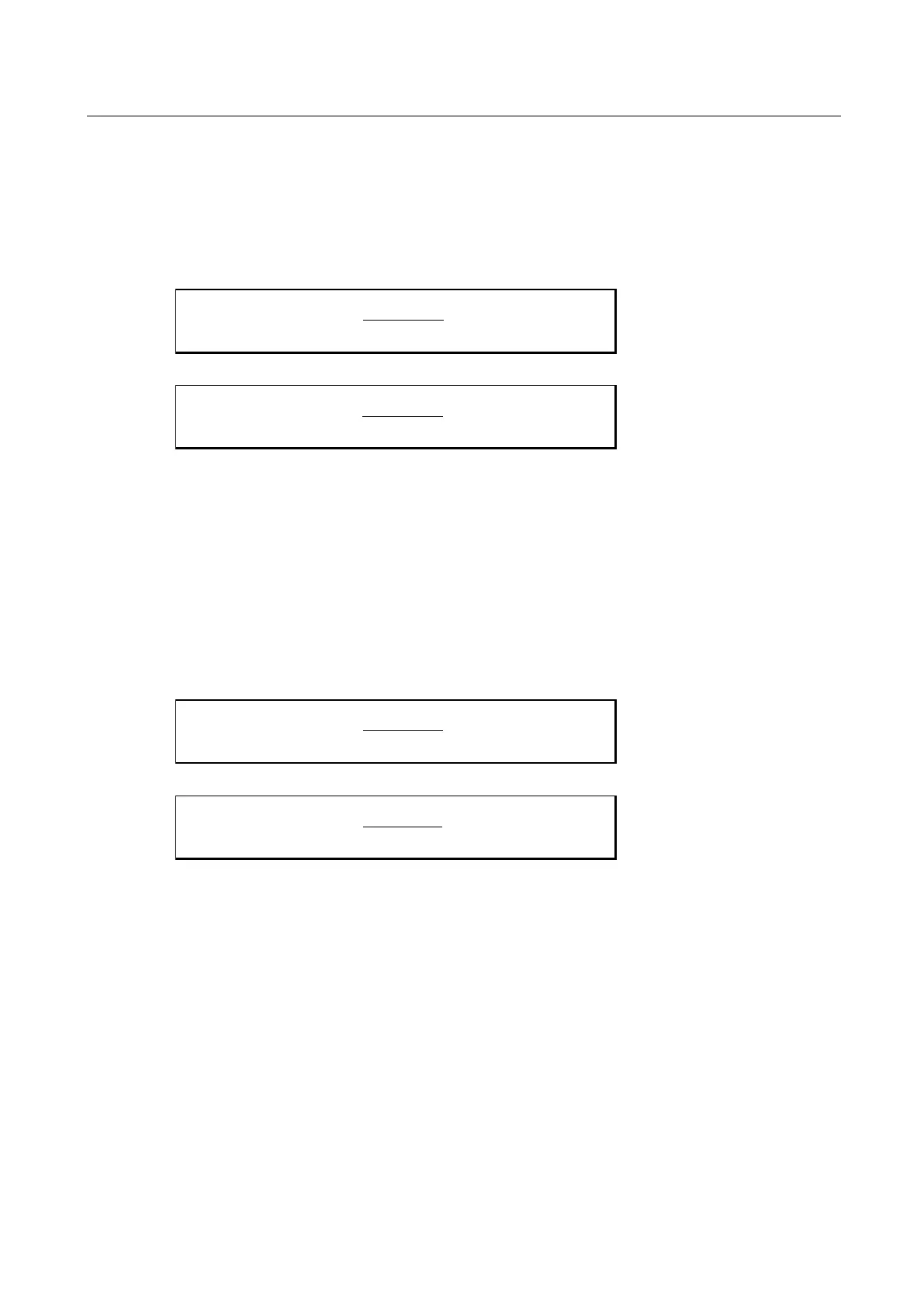
The traction target value is divided in the front and rear as a function of the support roller RPM.
Fx
n
n
n
Fx
h-Stv-St
v-St
v
⋅
+
=
Fx
n n
n
Fx
h-Stv-St
h-St
h
⋅
+
=
with
• Fx
v
Traction front
• Fx
h
Traction rear
• n
St-v
Support roller RPM front
• n
St-h
Support roller RPM rear
• Fx
Traction total
The variable (control of the eddy current brake) is divided between the front and rear axle. This
happens again as a function of the support roller RPM.
with
• y
v
Variable front
• y
h
Variable rear
• n
St-v
Support roller RPM front
• n
St-h
Support roller RPM rear
• y
Variable total
The traction target value which is calculated from the individual Road Loads, is divided between
the front and rear axle as with the normal traction regulation.
Pos: 148 /-----F ormat- ----/MA NUE LLER UMBR UCH Se itenum bru ch @ 0\mod_1134403577687_0.docx @ 1277 @ @ 1

 Loading...
Loading...
