S
ection
5
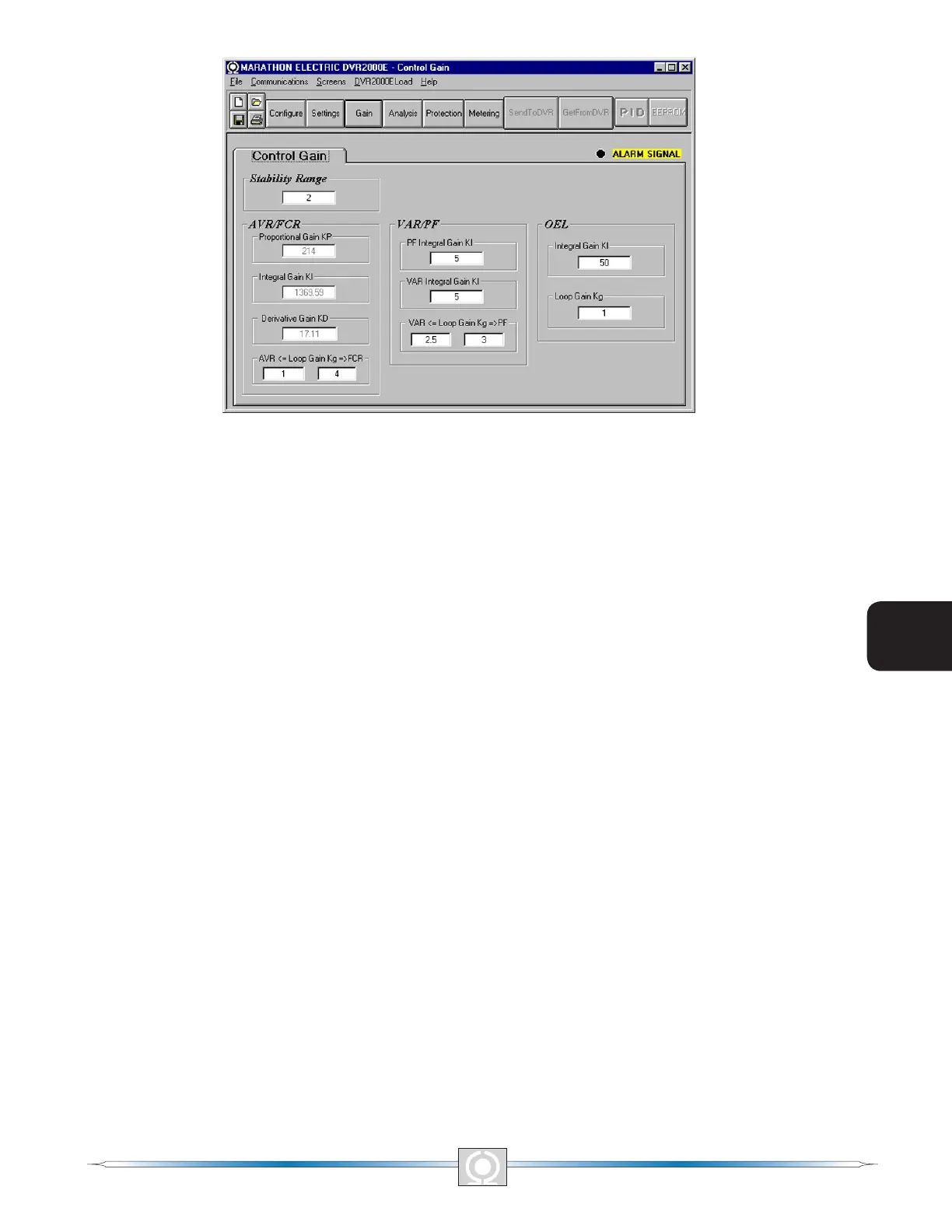
Figure 5-12. Control Gain Screen
AVR/FCR - Integral Gain KI. This setting selects the integral constant (KI) stability parameter. The DVR2000E
supplies a value that is equivalent to KI multiplied by the integral of the error between the voltage setpoint and the
actual generator output voltage. KI values of 0 to 2,000 may be entered in increments of 0.01.
Increasing the value of KI decreases the time required to reach steady state.
AVR/FCR - Derivative Gain KD. This setting selects the derivative constant (KD) stability parameter. The
DVR2000E provides an output value that is equivalent to KD multiplied by the derivative of the error between the
voltage setpoint and the actual generator output voltage. KD values of 0 to 1,000 may be entered in increments
of 0.01.
Increasing the value of KD reduces transient response ringing.
AVR/FCR - Loop Gain Kg=>AVR. This setting adjusts the loop-gain level of the PID algorithm for AVR . Loop Gain
values of 0.5 to 4.5 may be entered for AVR operation in increments of 0.01.
AVR/FCR - Loop Gain Kg=>FCR. This setting adjusts the loop-gain level of the PID algorithm for FCR . Loop Gain
values of 0 to 1,000 may be entered FCR operation in increments of 0.01.
VAR/PF - PF Integral Gain KI. This setting adjusts the integral gain and determines the characteristic of the
DVR2000E(C) dynamic response to a changed PF setting. PF KI values of 0 to 1,000 may be entered in
increments of 0.01.
VAR/PF - Var Integral Gain KI. This setting adjusts the integral gain and determines the characteristic of the
DVR2000E(C) dynamic response to a changed var setting. Var KI values of 0 to 1,000 may be entered in
increments of 0.01.
VAR/PF - VAR<=Loop Gain Kg=>PF. This setting adjusts the loop-gain level of the PI algorithm for var or power
factor control. Loop Gain values of 0 to 1,000 may be entered for var and power factor operation in increments of
0.01.
OEL - Integral Gain KI. This setting controls the rate at which the DVR2000E responds during an overexcitation
event. KI values of 0 to 1,000 may be entered in increments of 0.01.
OEL - Loop Gain Kg. This setting adjusts the loop-gain level of the PID algorithm for the over-excitation limiting
function. Loop Gain values of 0 to 1,000 may be entered in increments of 0.01.
48
3
Main Index
5
Section 5 Index
49
3
Main Index
5
Section 5 Index